Early Fictional Underwater Robots and Underwater Manipulators
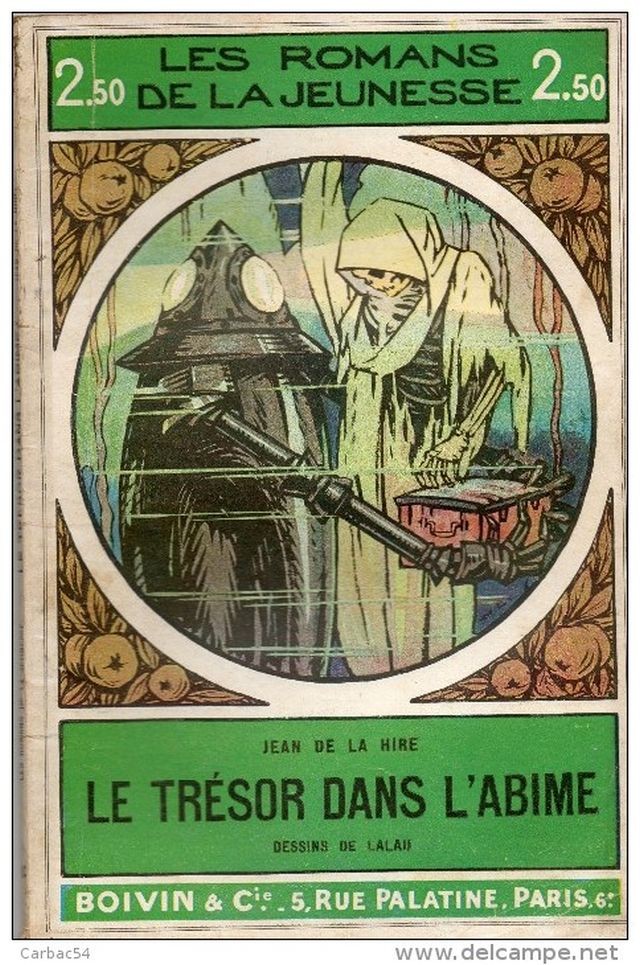
1907 – LE TRESOR DANS L'ABIME
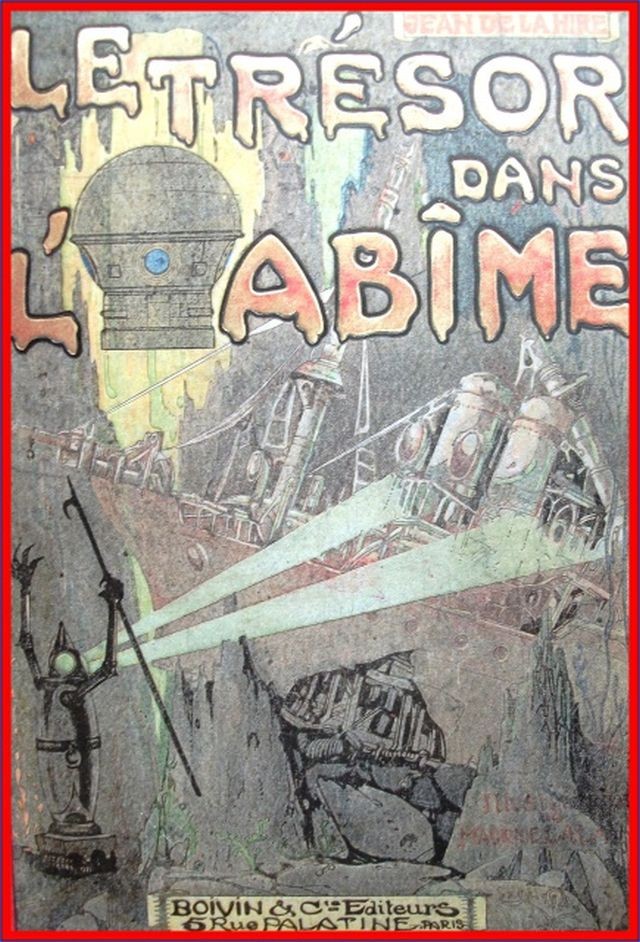
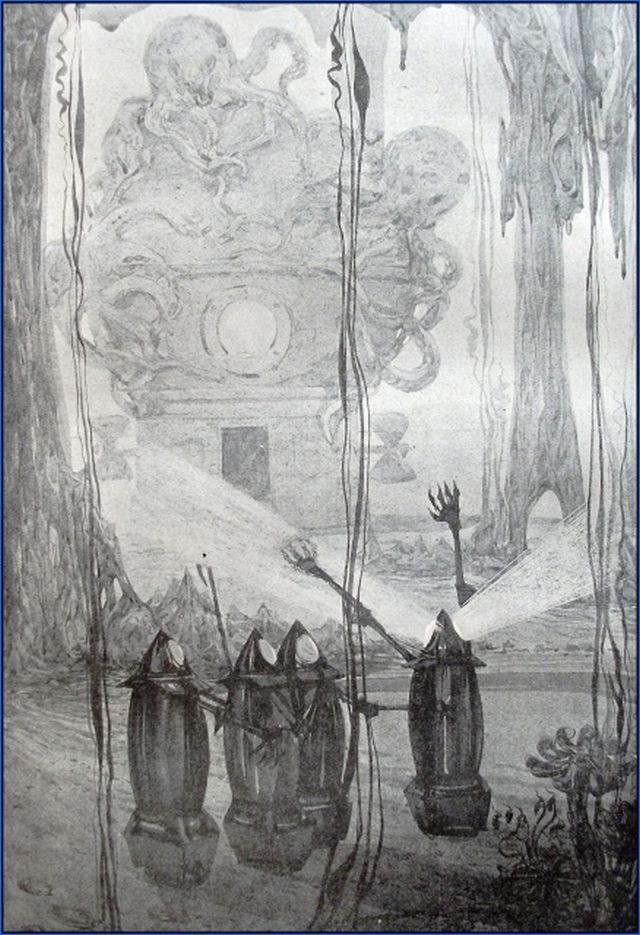
"LE TRESOR DANS L'ABIME" par Jean de LA HIRE – Edition ORIGINALE datée de 1907
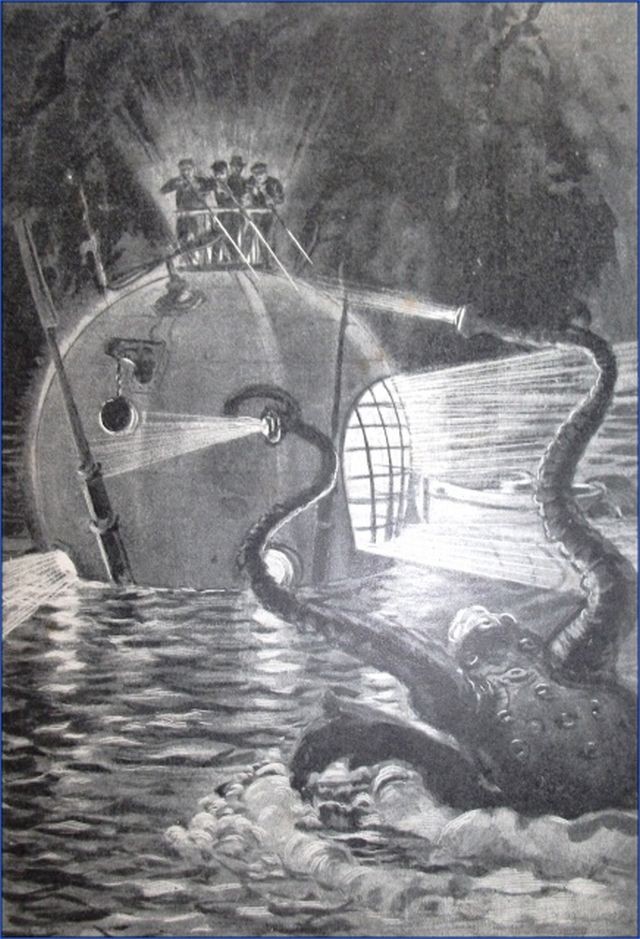
1907 – "Le Fulgur"
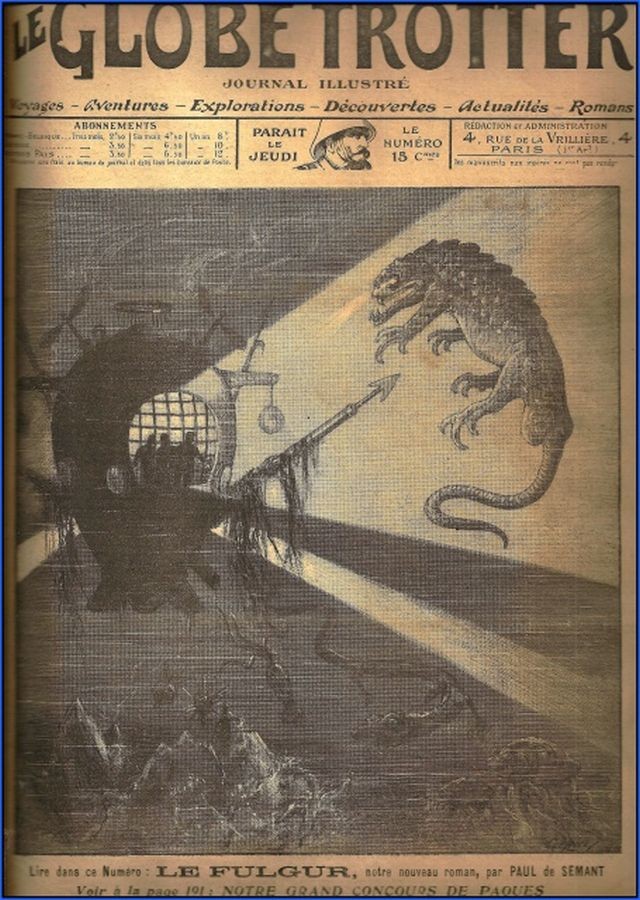
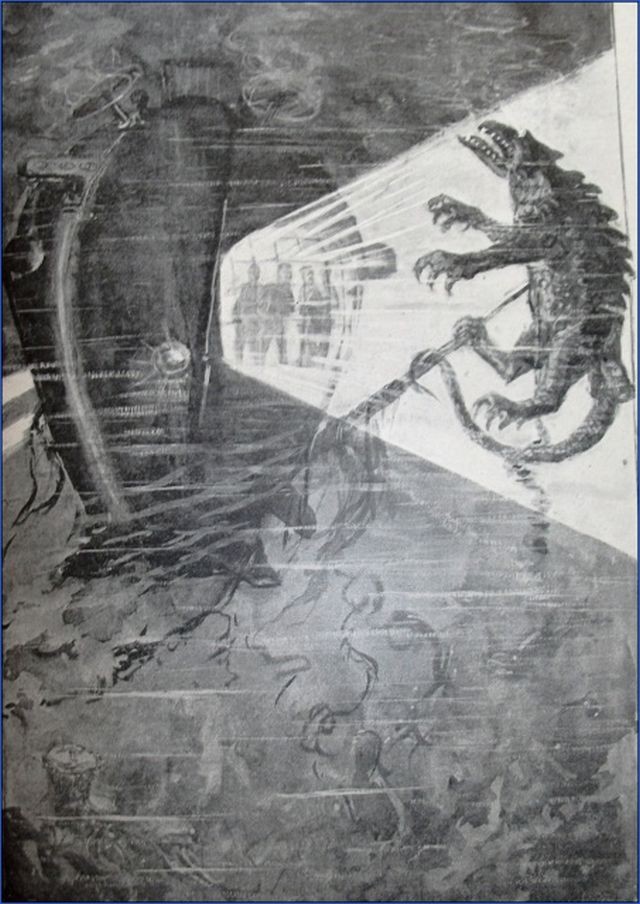
– « Le Fulgur » Publication en épisode dans la revue « Le Globe Trotter » du Jeudi 21 Mars 1907, N° 268 au Jeudi 15 Aout 1907 ; N° 289. Illustré par Clérice.
– « Le Fulgur » Librairie E.Flammarion.Grand in 8° cartonné polychrome. Illustré par Marin Baldo. Probablement publié en 1910.
1929 – The Mysterious Island
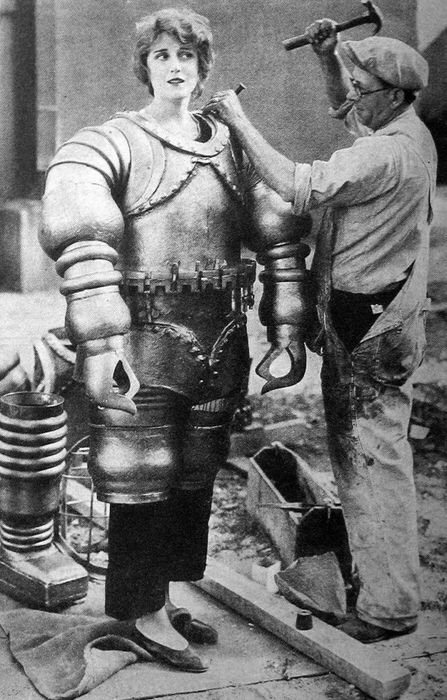
No, not a Fem-bot, but Jacqueline Gadsden as Sonia Dakkar (credited as Jane Daly) being prepared for a scene in The Mysterious Island. The technician being a bit heavy-handed, I think!
On a volcanic island near the kingdom of Hetvia rules Count Dakkar, a benevolent leader and scientist who has eliminated class distinction among the island's inhabitants. Dakkar, his daughter Sonia and her fiance, engineer Nicolai Roget have designed a submarine which Roget pilots on its initial voyage just before the island is overrun by Baron Falon, despotic ruler of Hetvia. Falon sets out after Roget in a second submarine and the two craft, diving to the ocean's floor, discover a strange land populated by dragons, giant squid and an eerie undiscovered humanoid race.
1932
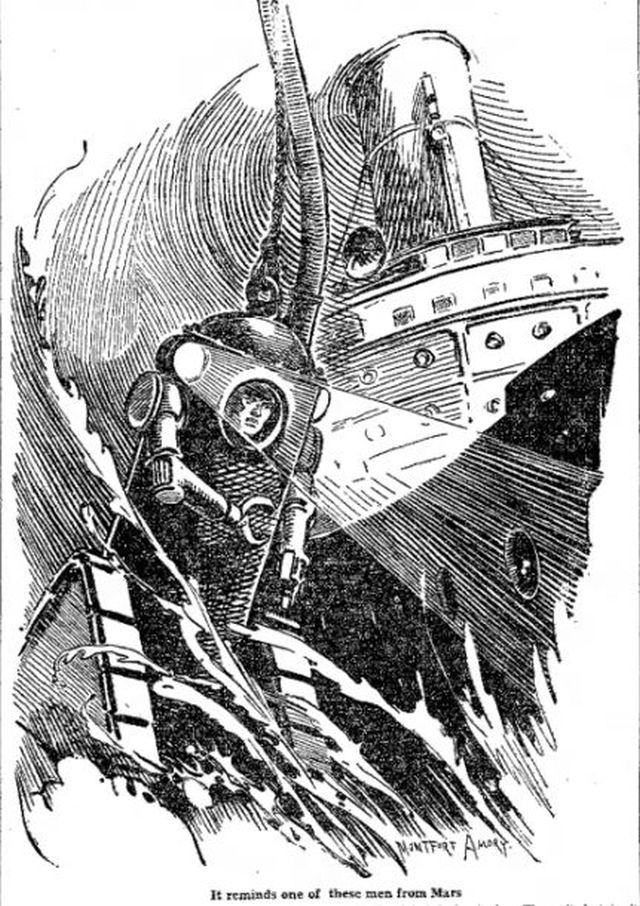
Artist's [Montfort Amory] depiction of Salvage tank. Really a cross between Bowdoin's Armoured Suit and the Diving Bell. Source: The Ogden Standard Examiner, Feb 21, 1932.
1933

Le Tunnel de Gibraltar by Colonel ROYET, Illustration de Maurice TOUSSAINT
TALLANDIER, coll. Le Livre national – Bibliothèque des grandes aventures n° 494, 1933
1933 – In the City Beneath the Sea (08/21/1933 – 06/30/1934) 270 strips

Brick Bradford from Wikipedia.
Brick Bradford was a science fiction comic strip created by writer William Ritt, a journalist based in Cleveland, and artist Clarence Gray. It was first distributed in 1933 by Central Press Association, a subsidiary of King Features Syndicate which specialized in producing material for small-town newspapers.
Ritt grew tired of Brick Bradford in the mid-1940s, and by 1948 he had turned over first the daily and then the Sunday to Gray, who did the strip by himself until his health problems increased. In 1952, Paul Norris (who had been working on King's Jungle Jim) took over the daily. When Gray died in 1956, Norris took over the Sunday strip. Norris retired in 1987, and the strip was retired as well with the daily ending April 25, 1987 and the Sundays two weeks later.
"Brick Bradford" achieved its greatest popularity outside the United States. "Brick Bradford" was carried by both newspapers and comic books in Australia and New Zealand. In France, the strip was known as "Luc Bradefer" (Luke Ironarm), and was published in many newspapers. The strip was also widely published in Italy.
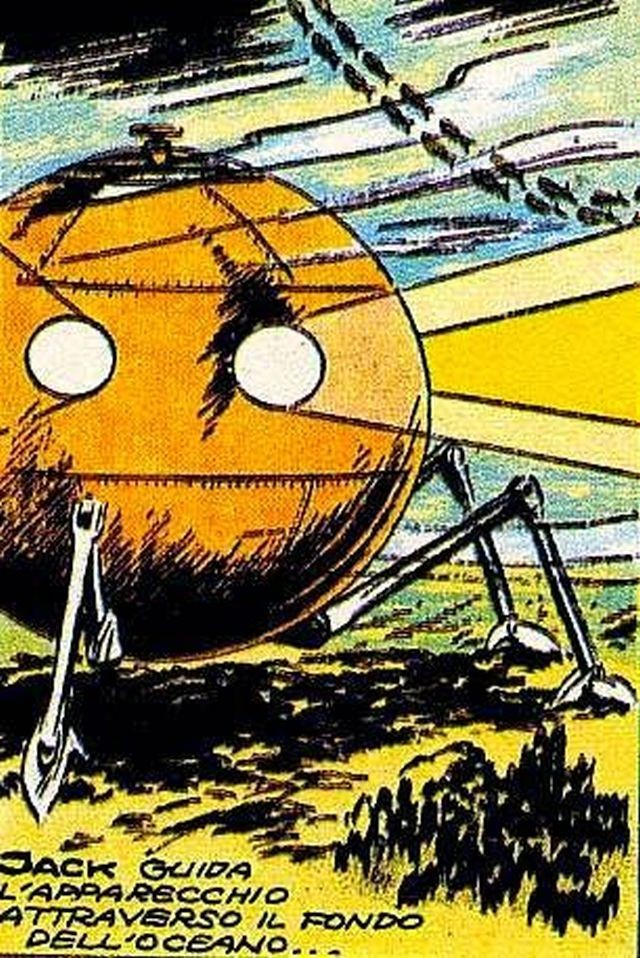
1943 – Underwater Walking Robot
VECKANS AVENTYR #34 Swedish Pulp/Comic 1943
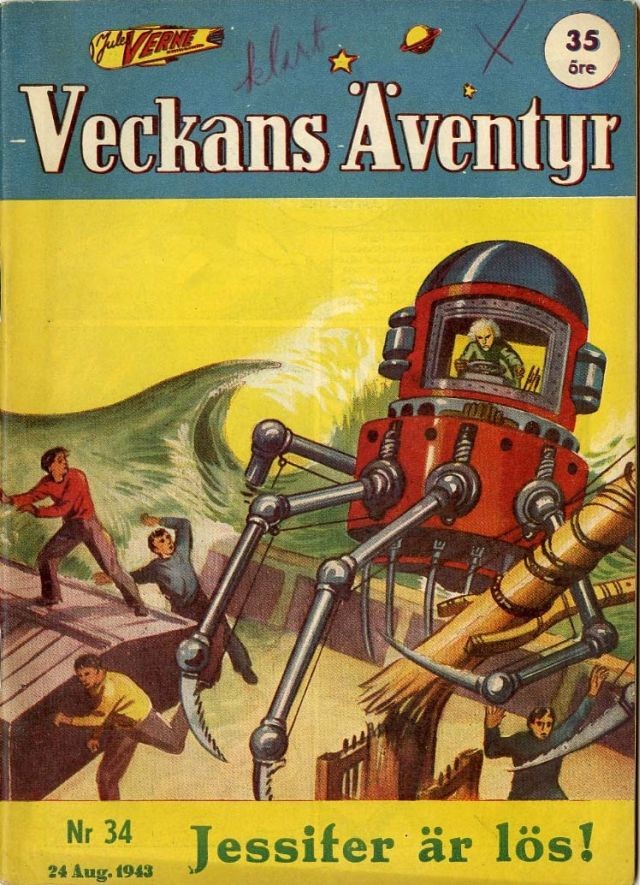
VECKANS AVENTYR was a long-running Swedish science fiction/comics/pulp magazine originally titled JULES VERNE MAGASINET, published from 1940-47. The magazine features reprints of American pulps and comics. The comics were limited to a few b/w pages at the back of each issue, and color inside front, inside back, and back covers.
1949 – Mysta of the Moon – Undersea mechanical monster. Planet Comics.

1952
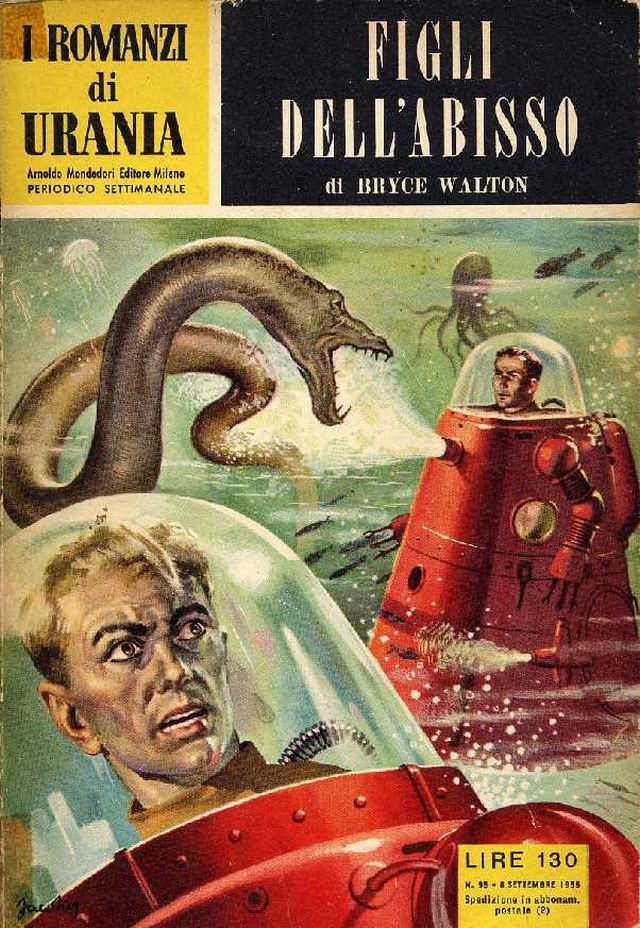
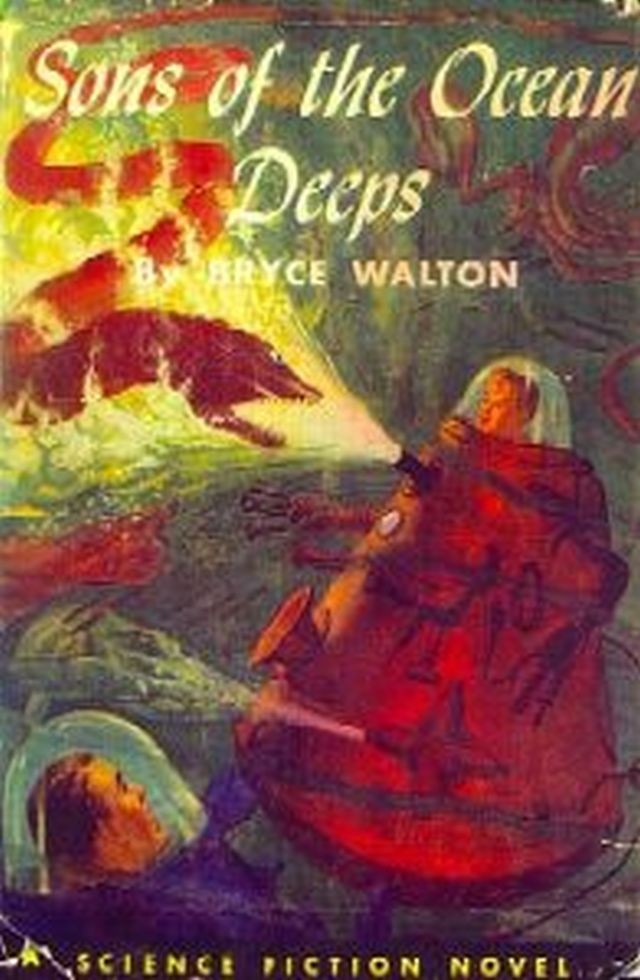
Figli Dell'Abisso di BRYCE WALTON – 1952
Figli dell'abisso, tr. Eugenio Crescini, ill. [Aster] E2 [SF] Sons of the Ocean Deeps, Winston, Philadelphia # 9, 1952
Copertina di Carlo Jacono
Jon West, un giovane, brillante cadetto, figlio di una ricca famiglia americana, aspira a far parte dell'eletta schiera degli Astronauti, gli eroi delle Nazioni Unite dell'anno 2039. Jon vuole la notorietà, la gloria personale, la bella divisa scarlatta… e il dover rinunciare a tutto questo per cause indipendenti dalla sua volontà, fa di lui un uomo insofferente, ammalato di autocommiserazione. Andrà nel Servizio Abissale, quasi per nascondersi, forse per farla finita. Ma laggiù, tra pericoli spaventosi come la pressione dell'acqua, tra mostri orripilanti e crudeli come il "divoratore nero", troverà nelle incredibili città sottomarine, anche altri uomini. Uomini come Yeager, l'amico per eccellenza, come Clarence, il debole orfano perseguitato, dall'anima di poeta, come il vecchio Sam, esploratore spericolato ed esperto, come il Comandante Moxson, ferreo ed umano, come l'esasperato Sprague che vive nel ricordo di un amato padre ucciso dal mare per colpa degli uomini. A contatto di queste vite dedicate al Servizio per amore del mare, il grande fascinatore, troverà l'animo generoso di Jon il suo equilibrio? Sfondo a questa vicenda umana e toccante è il mare, principio di ogni vita, con le sue creature terribili ed ingannatrici, con le sue perle ed i suoi fiori, con le sue luci di sogno e la sua oscurità paurosa. Il mare, fonte inesauribile di ogni tesoro, dominato dall'uomo, dal suo coraggio, dalla sua intelligenza, dalla sua ricerca scientifica sempre più profonda, dalle sue macchine.
Jon West, a brilliant young cadet, son of a wealthy American family, aspires to join the ranks of the elect Astronauts, the heroes of the United Nations of the year 2039. Jon wants fame, personal glory, the beautiful scarlet uniform … and having to give up all this for reasons beyond his control, he makes him a man impatient, sick of self-pity. It will go into service Abyssal, almost hiding, perhaps to call it quits. But over there, between the dangers scary as the water pressure, including horrifying monsters and cruel as the "devouring black", will find the amazing underwater cities, even other men. Men like Yeager, friend par excellence, as Clarence, the weak orphan persecuted, by the soul of a poet, like the old Sam, reckless explorer and expert, as the Commander Moxson, iron and human, as the exasperated Sprague living in memory of a beloved father killed by sea because of men. A contact of these lives dedicated to the service of love for the sea, the great charmer, will find the generous spirit of Jon his balance? Background to this human and touching is the sea, source of all life, with its fearsome creatures and deceptive, with her pearls and her flowers, with its lights dream and his scary darkness. The sea, endless source of each treasure, dominated by man, by his courage, by his intelligence, by his scientific research deepening, its machines.
1954 – Diving-Tents of Captain Space Kingley
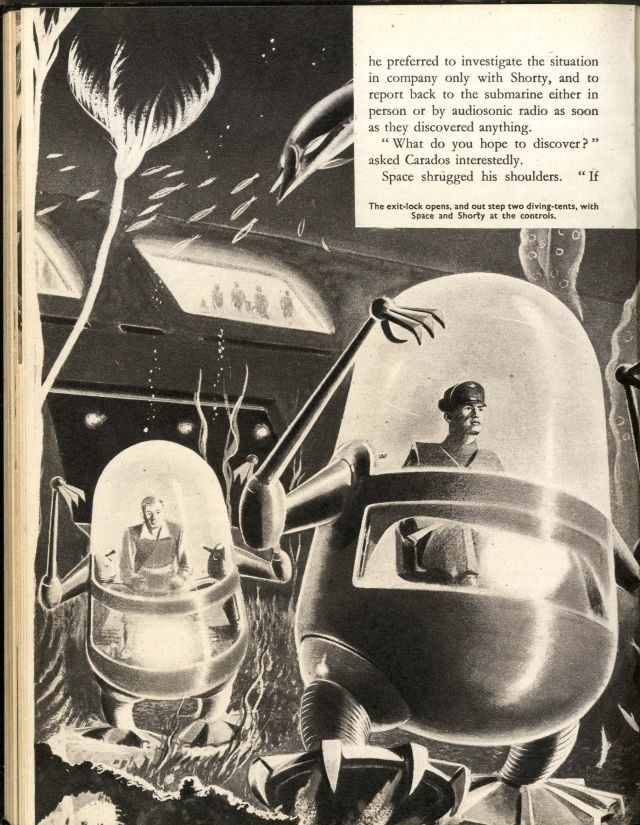
"The Adventures of Captain Space Kingley" , Samson Low , Marston & Co Ltd, London, England. Issued 1954, Written by Ray Sonin with illustrations by R.W. Jobson.
A 126 page Hardback with a great Space Rocket & Astronauts Themed Front Cover! Following the introduction to the hero are six short story missions with titles including 'The rings of Saturn' , 'The mechanical animals of Mars ' and 'The submarine city'. All six stories are supported by some fantastic black/white Sci-Fi illustrations.
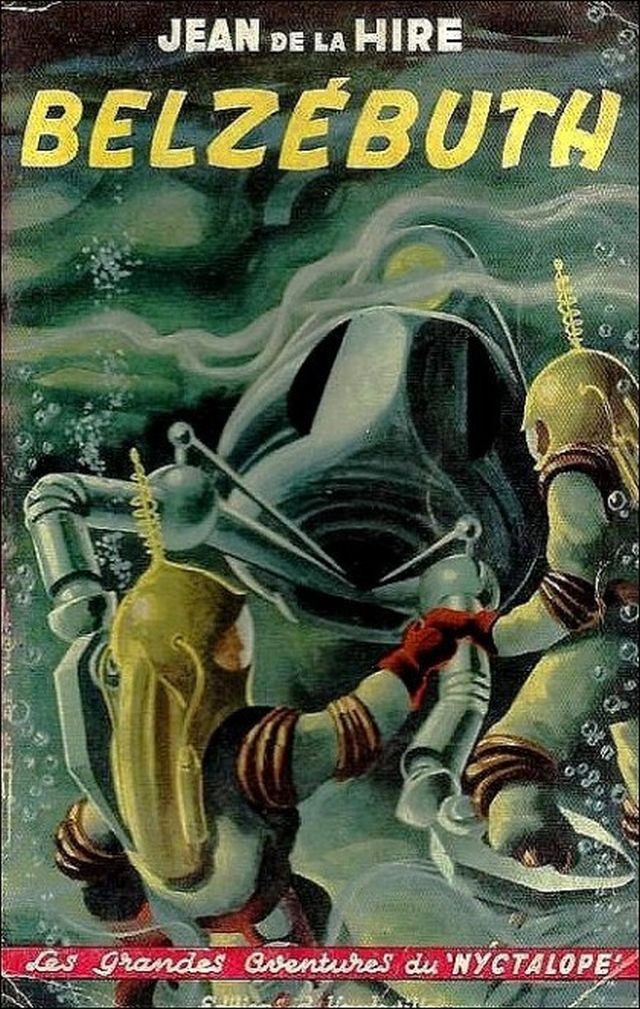
1954 – « Belzébuth » par Jean de la Hire. Tome 1. Éditions D'Hauteville « Les grandes aventures du Nyctalope » N°12. 1954.
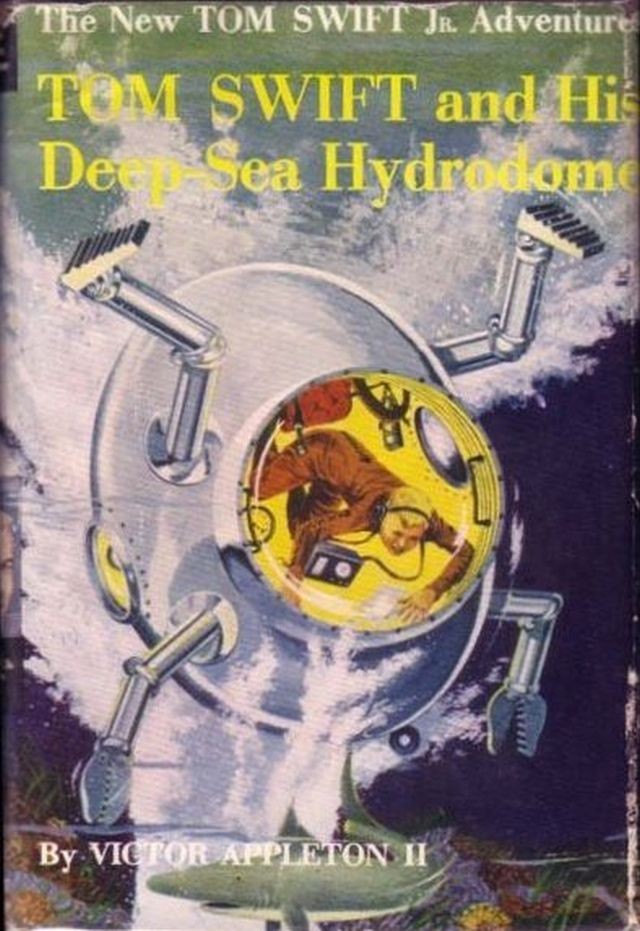
1954 – The Tom Swift Fat Man Diving Suit
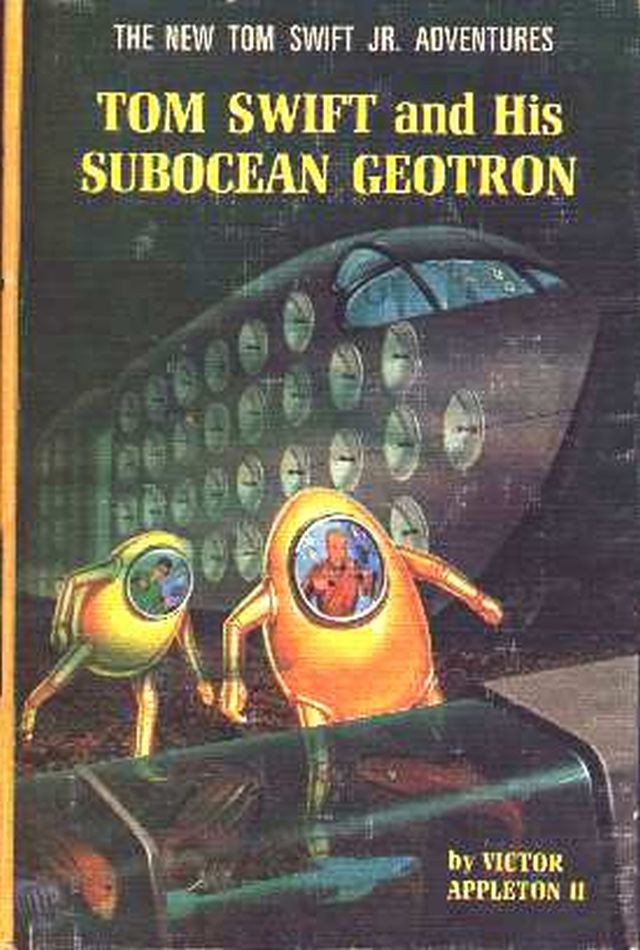
1966 – Tom Swift "Geotron" with Fat Man suits
![]()
1964 – Tom Swift and His Aquatomic Tracker
The Fat Man Diving Suit was first illustrated in 1958 in the book Tom Swift and his Deep-Sea Hydrodome, but originated in 1954. Tom Swift and his Jetmarine was the first to feature the Fat Man suits.
What about the Fat Man suits? Tom Swift's father wanted Tom to invent a way to escape from the Jetmarine in case something went wrong. Tom Swift complied by creating his Fat Man suits, which he uses over and over and over again in other books.
Basically, the Fat Man suits were just like miniature, one-man submarines, except they were equipped with arms and legs to enable great maneuverability and dexterity. (For a picture, see the cover of Tom Swift and his Deep-Sea Hydrodome) These miniature subs were completely equipped: they had a recyclable oxygen supply, a propulsion system, and a ballast system. Tom got a great deal of use out of these creatures, mainly for retrieving underwater objects or underwater construction.
Some passages from the book on the Fat Men:
Tom smiled. "I've been working on that as a secret project. Bud has dubbed the suit the Fat Man."
Tom briefly outlined the principal features of the metal Fat Man. The body of it was egg-shaped and was five feet in diameter at the center. Inside an operator's seat had been build, surrounded by a number of instruments. There was also a quartz vision plate. This window would serve as entrance to the Fat Man.
Tom pointed out that the suit was propelled by air pressure and was equipped with small ballast tanks, which would enable it to be manipulated like a tiny submarine. Two such Fat Men were to be installed in the Jetmarine next to the decompression chamber, which had been designed to be opened either from the inside or the outside.
Mr. Swift listened intently as Tom continued, "But my main innovation, Dad, consists of the Fat Man's pantograph arms and legs. Hands and feet, too. I work them on button controls from inside. They're almost human."
The elder inventor raised his eyebrows. "How do you keep this gimmick from falling over?"
"Gyroscope!" Tom replied. "An automatic balancing brain."
–
"The lithium hydroxide," said Baker, "is taking care of what the boys are exhaling. And that excellent gadget by which Tom is getting oxygen from the water is a great invention, harder to perfect than the sub itself. If anything should happen to the Jetmarine, they would be able to live in the suits a long time."
1966
The Underwater Robot was a TV Comic story featuring the First Doctor, John and Gillian.
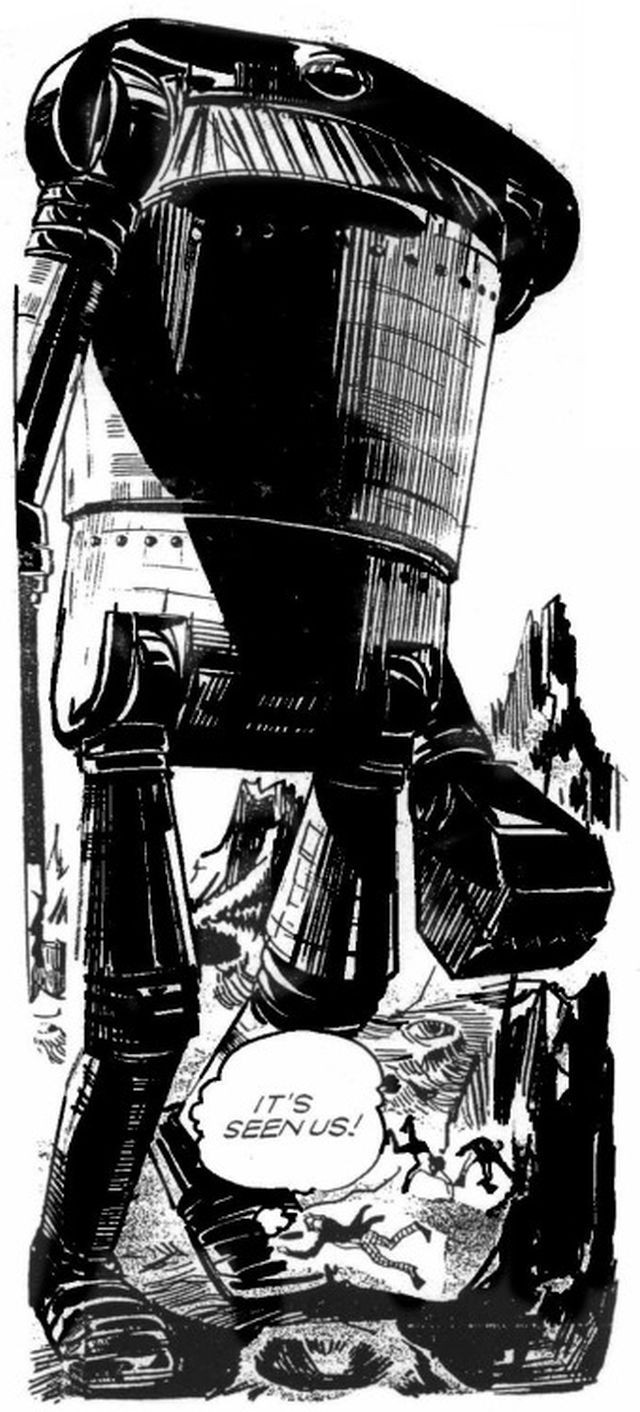
Beneath a deep ocean, the time-travellers are brought aboard a giant, walking robot. The robot is, in truth, a pirate-operated craft used by two insane inventors to plunder surface ships of their wealth. The First Doctor fights to free the slaves aboard the robots, and to overthrow its sinister operators.
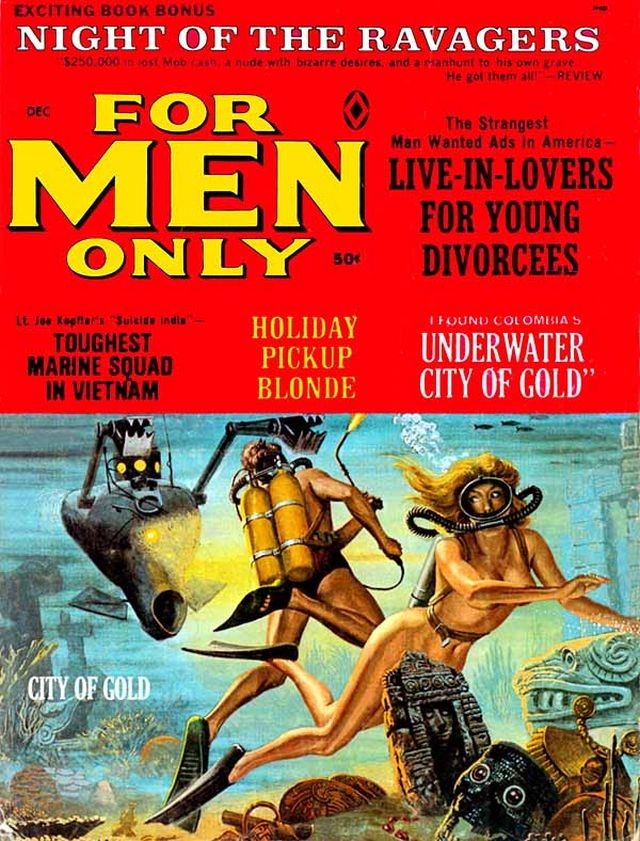
1968 – For Men Only (December) – I Found Columbia's Underwater City of Gold. Illustrated by Bruce Minney.
1968 –> Klaus Bürgle Illustrations


See more Klaus Bürgle illustrations here.
1964-9 Japanese Sci-Fi Illustrations

1964c. Undersea mining vehicle. Illustration possibly by Ten-an Ito.

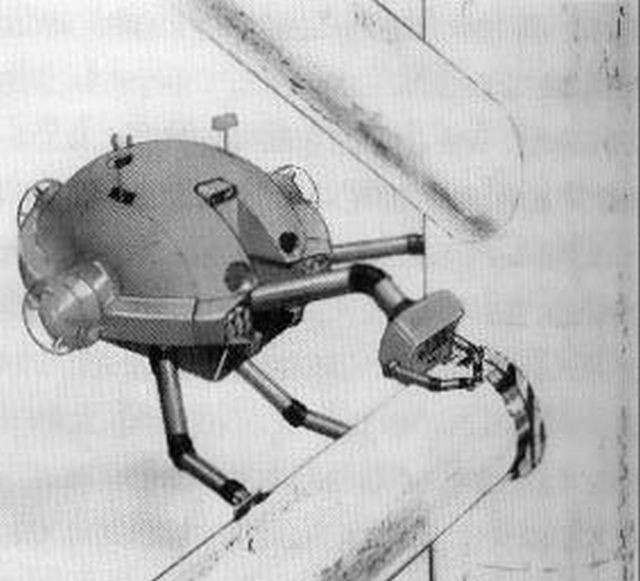
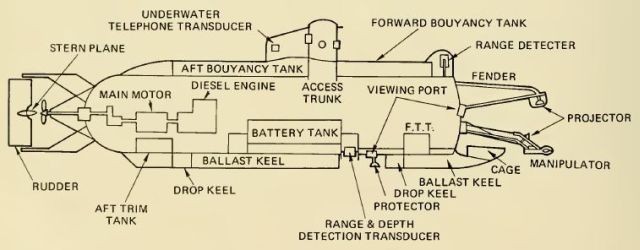
Submarine rescue vehicle c1969.

Undersea legged mining vehicle c1969.

Not undersea, but intravenous! A cross between a JIM Suit and 2001: A Space Odyssey Pod arms. Image by Teruya Yamamoto, I believe. c1969.
1992
Приключения Алисы. Том 5. Гай-до – Alice's Adventures, 1992
Кир Булычев (Игорь Можейко) writer Kir Bulychev (Igor Mozheyko )

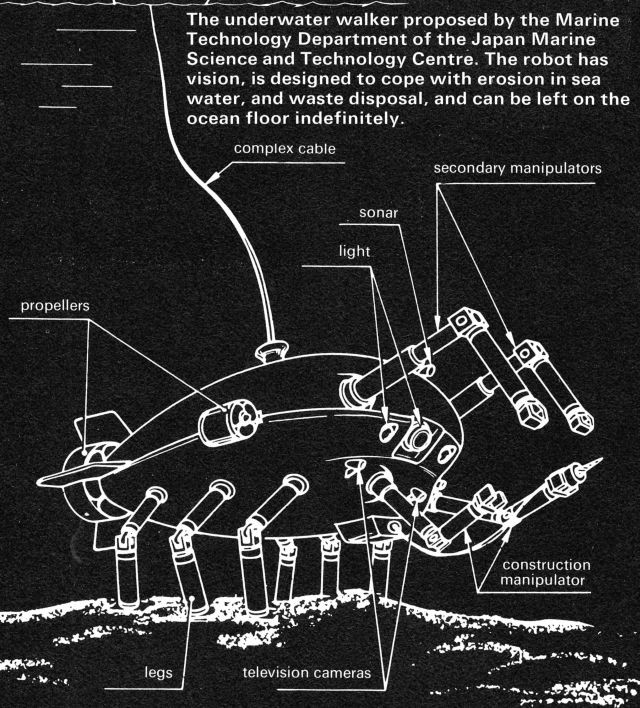
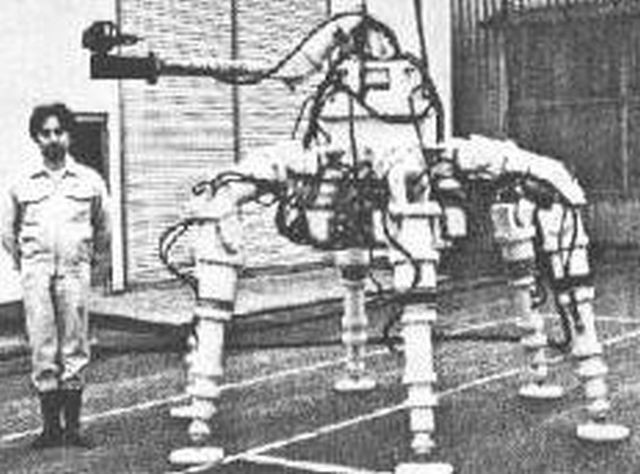
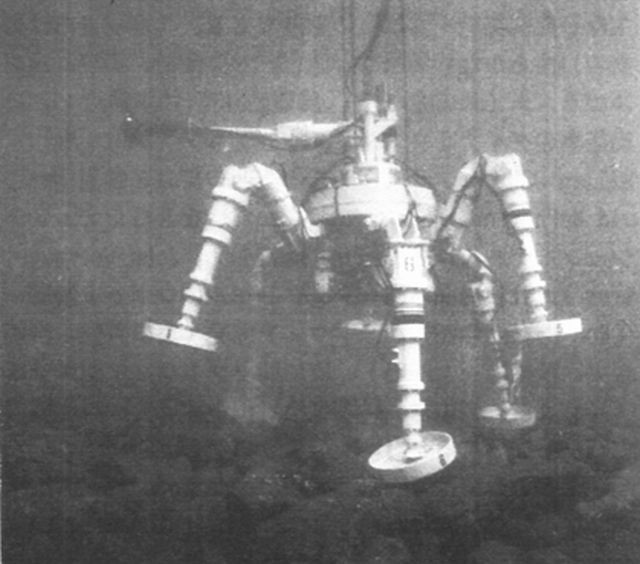
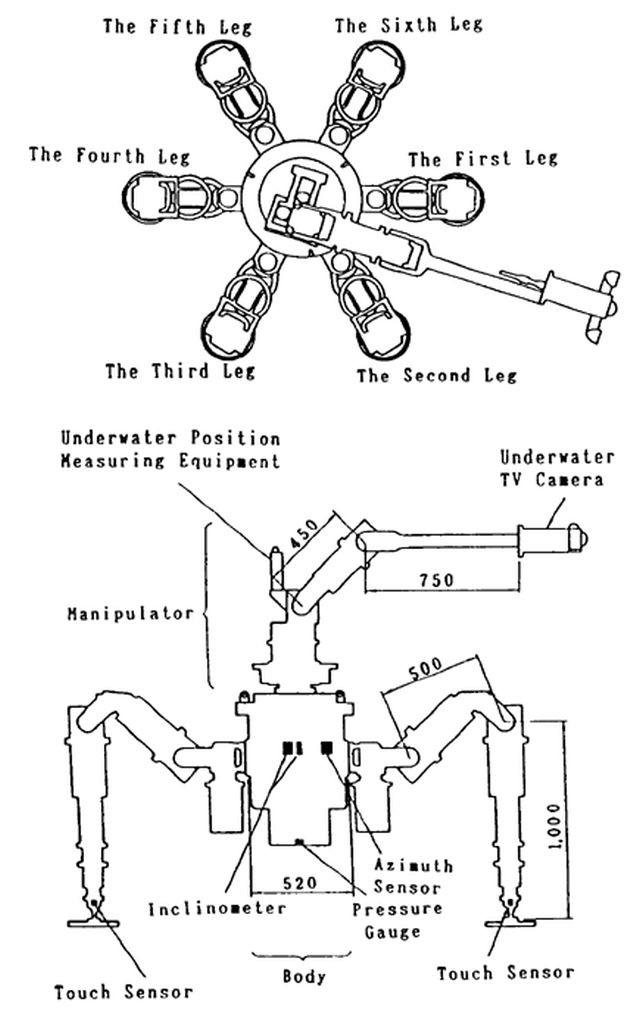
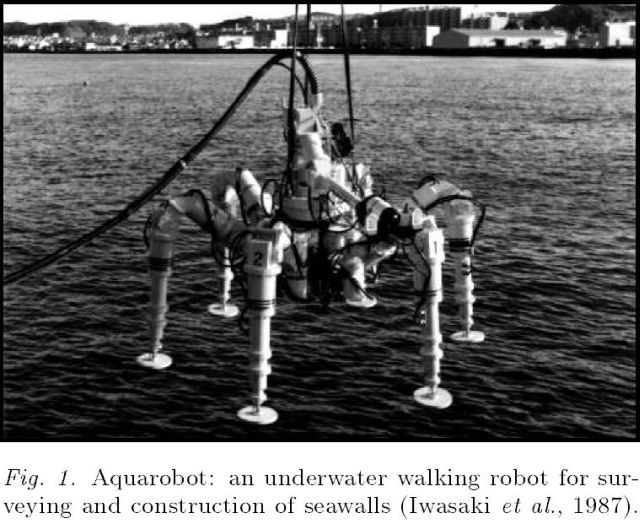
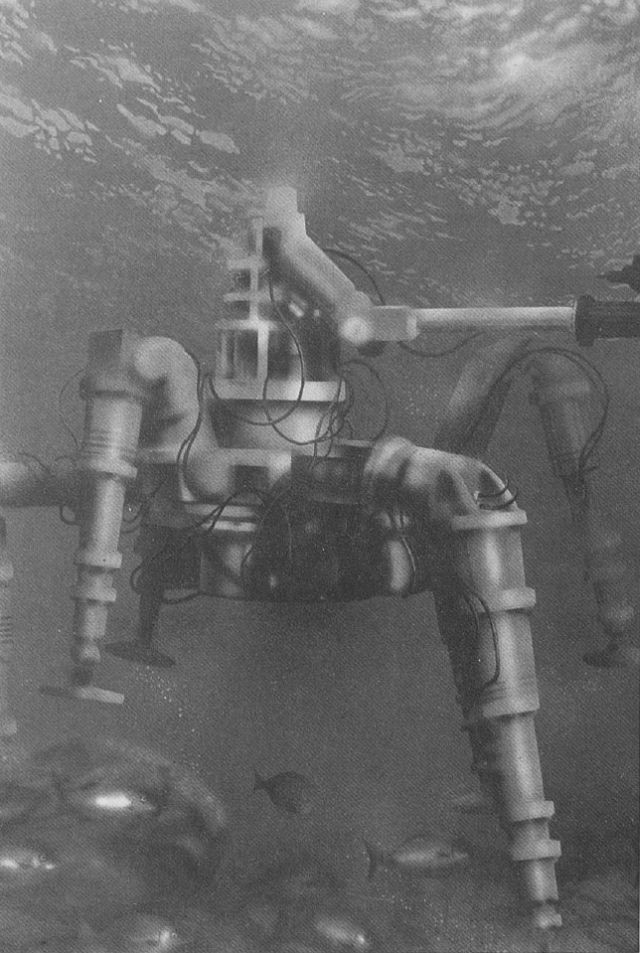
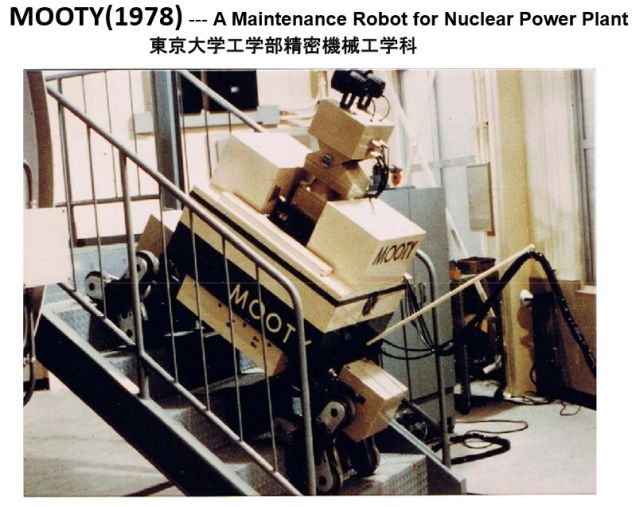
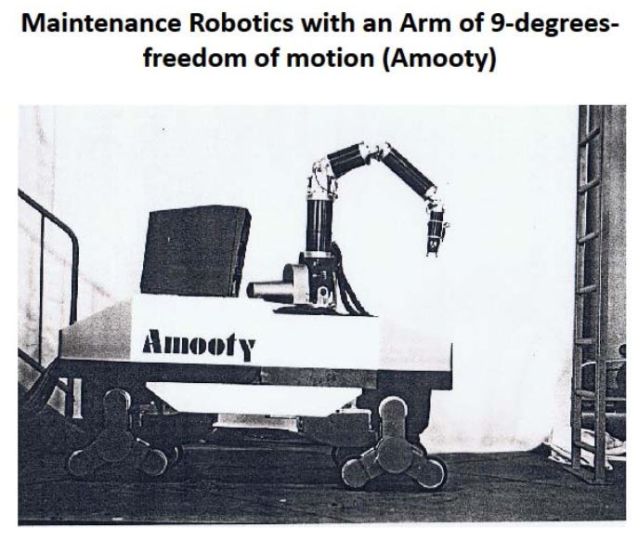
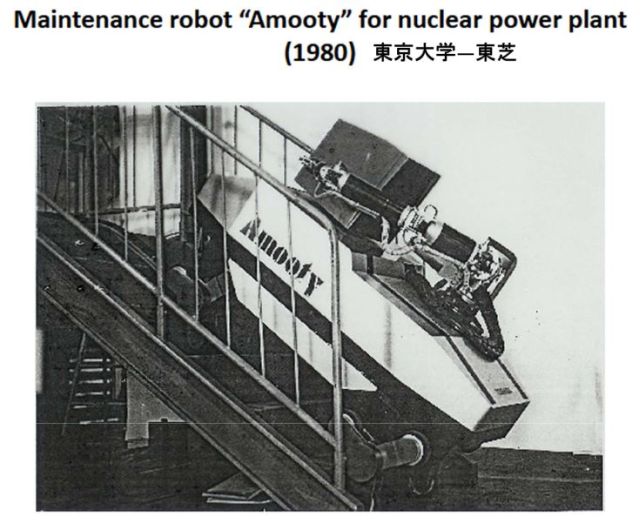
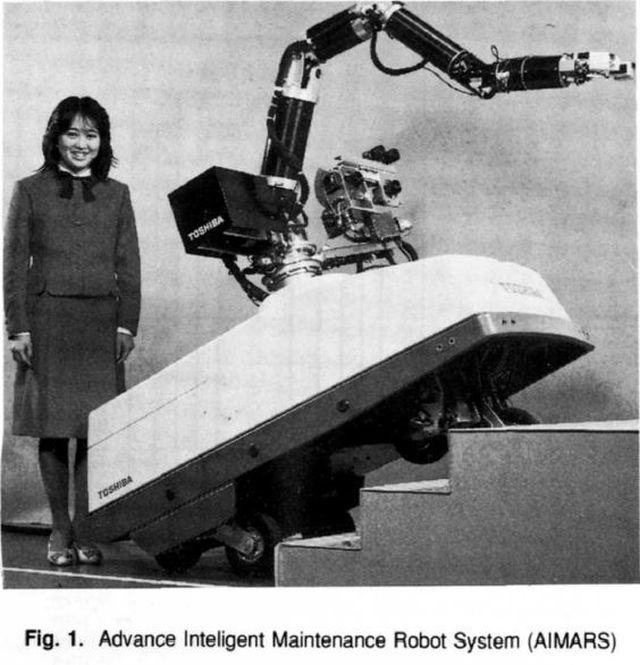
See other real early Underwater Robots here.