1989 – Shinkai 6500 Submersible – (Japanese)

1989 – Shinkai 6500 Submersible.
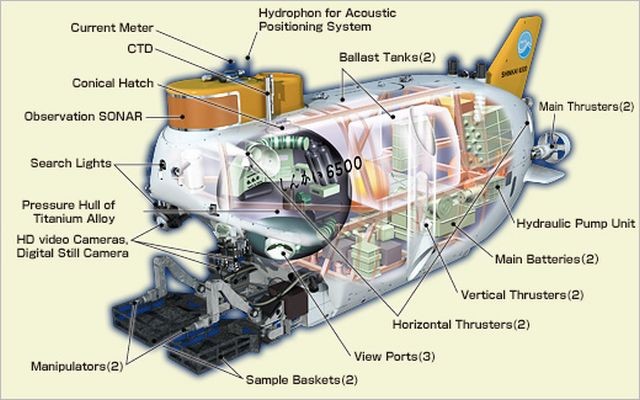
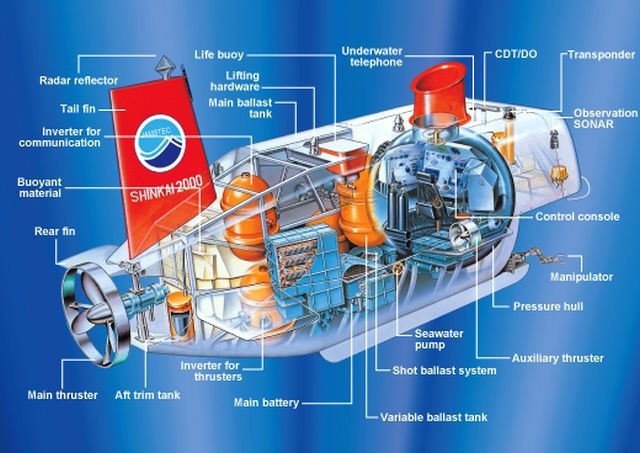
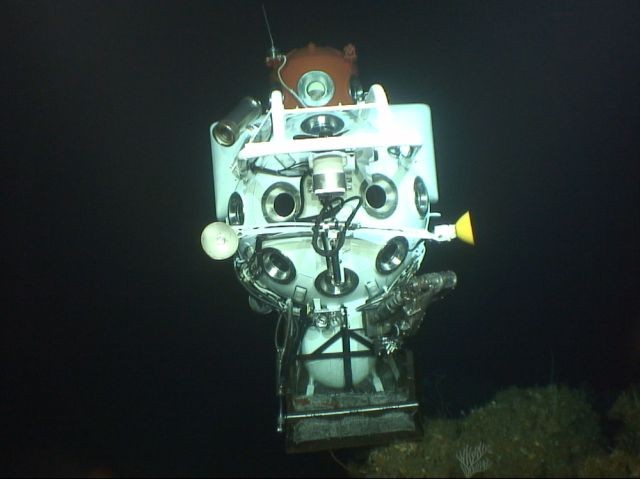
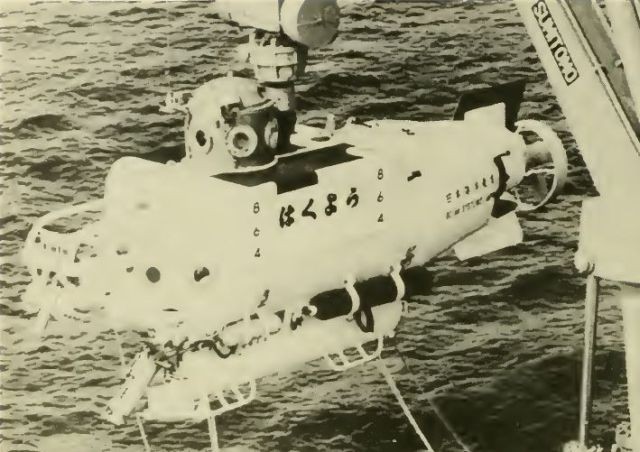
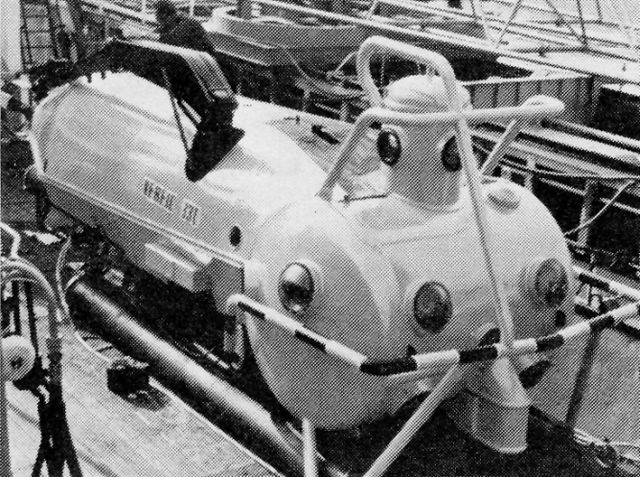
In Japanese, shinkai means deep sea. Aptly named, the Shinkai 6500 (しんかい) is a manned research submersible that can dive up to a depth of 6,500 m. It was completed in 1989 and until 2012 it had the greatest depth range of any manned research vehicle in the world. The Shinkai 6500 is owned and run by the Japan Agency for Marine-Earth Science and Technology (JAMSTEC) and it is launched from the support vessel Yokosuka.
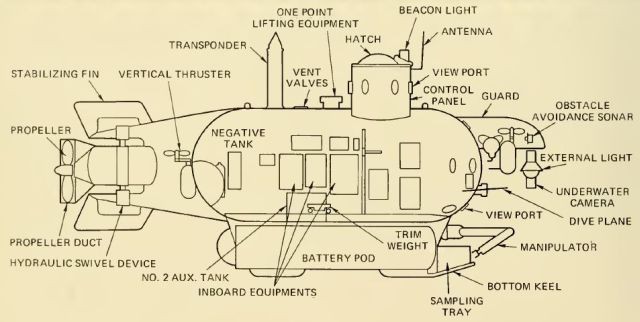
Two pilots and one researcher operate within a 73.5 mm thick titanium pressure hull with an internal diameter of 2.0 m. Buoyancy is provided by syntactic foam.
Three 14 cm methacrylate resin view ports are arranged at the front and on each side of the vehicle. Source: Wiki.

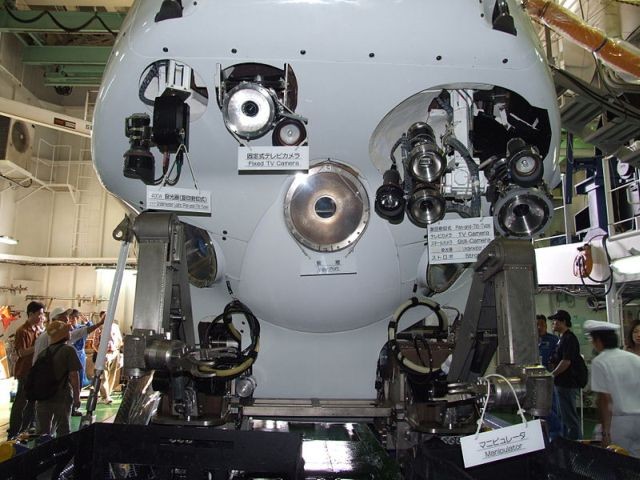


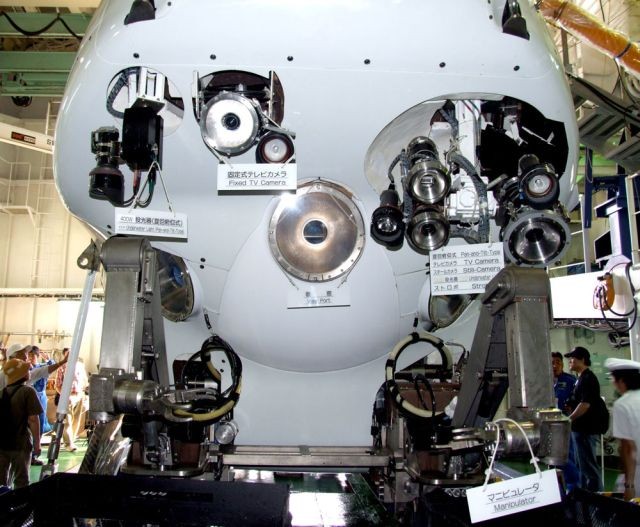
The SHINKAI 6500, owned by Japan Agency for Marine-Earth Science and Technology, can go deeper underwater than any other manned submarine can. It uses underwater manipulators designed by SCHILLING ROBOTICS, LLC., the world's top manipulator manufacturer for underwater robots.
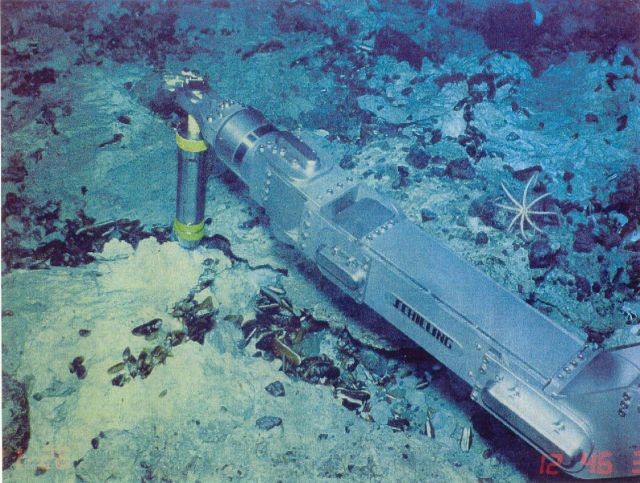
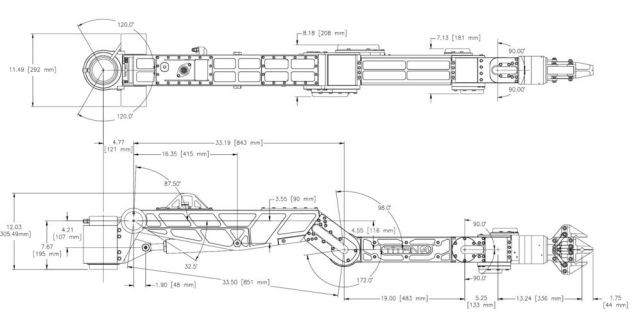
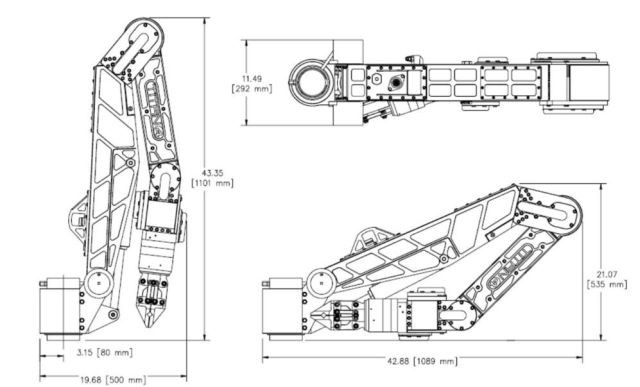
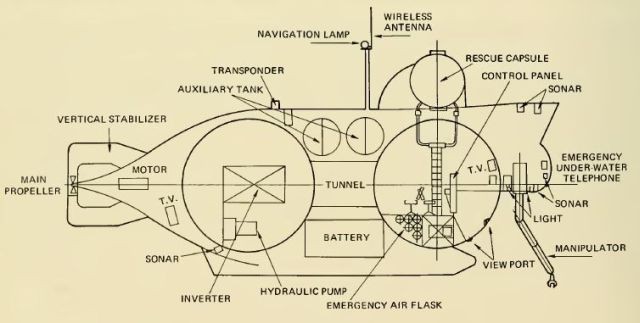
Schematic of Schilling manipulator arms as used by the Shinkai 6500.

See other early Underwater Robots here.