1985 – Direct Link Prehensor (DLP) – John W. Jameson (American)

1985 – Direct Link Prehensor (DLP) by John W. Jameson.
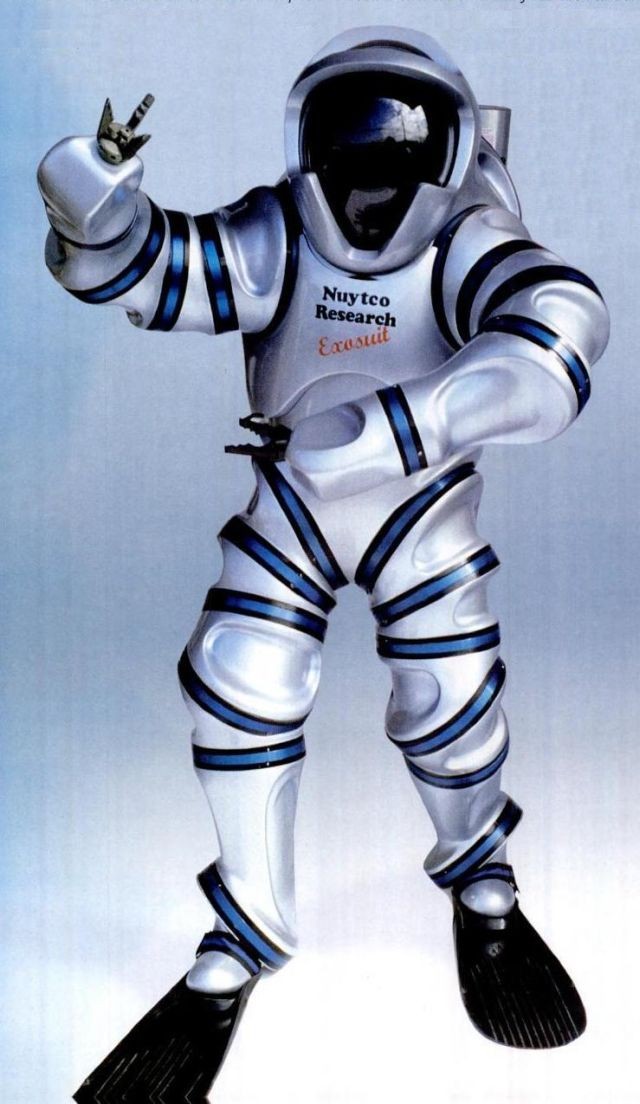
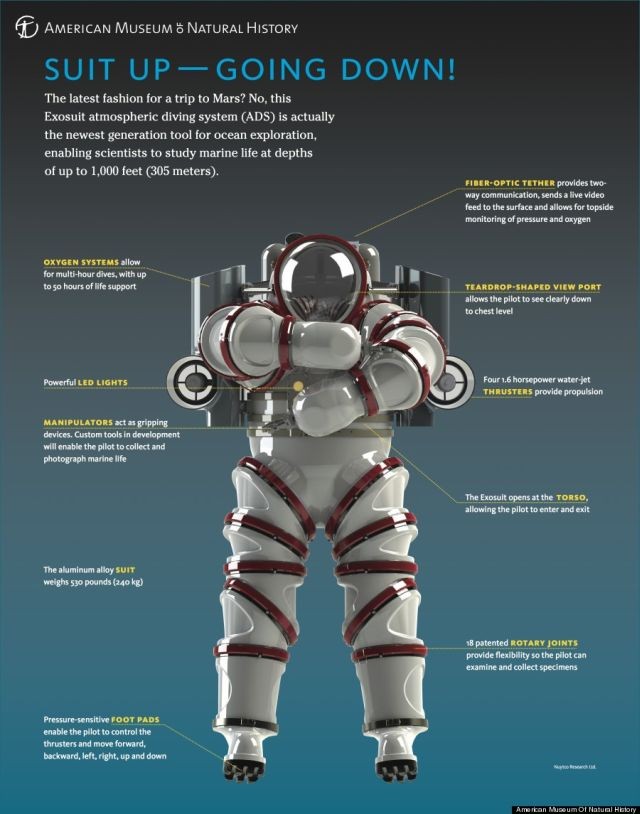
The project stalled in 1986. Originally designed for astronaut hard suits, it was later licensed to Nuytco for its atmospheric diving systems, or ADS, particularly the then new Exosuit.

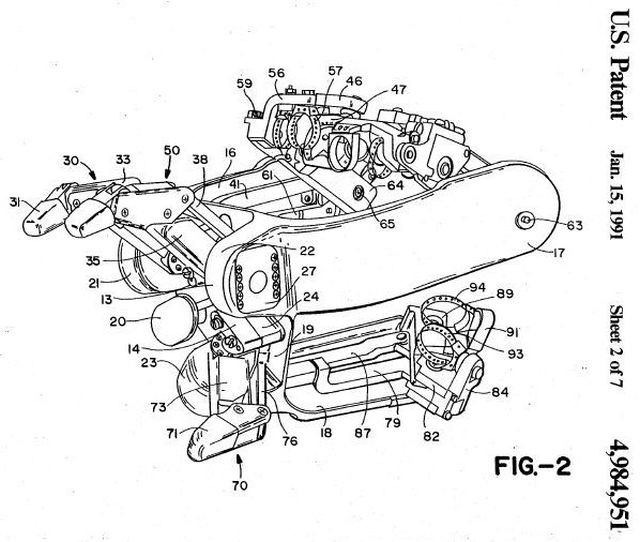
The Prehensor is a manipulator that matches the dexterity of a gloved human hand. External ‘fingers’ mimic the exact movements of the inside ‘master’ hand and provide full, 100% reflexive index-ability of the external thumb, in concert with the number of other digits employed. In addition, the outside ‘slave hand’ provides directly proportional sensory feedback of pressure, weight, etc., to the inside master hand (yours!).
The unique capabilities of the Prehensor were developed specifically with the Nuytco ADS ‘Exosuit’ in mind, but the system can easily replace existing simple jaw-style manipulators for use on ADS units. An electronically-controlled version is under development for use on remotely operated vehicles (ROV’s) and deep submersibles. There also has been discussion with the national space agencies of several countries on the use of the ‘Prehensor’ as a possible alternative to the conventional space-suit gloves.



Mechanical prehensor
Publication number US4984951 A
Publication type Grant
Application number US 07/412,540
Publication date 15 Jan 1991
Filing date 22 Sep 1989
Priority date 20 Jan 1988
Fee status Lapsed
Inventor John W. Jameson
Original Assignee The Board Of Trustees Of The Leland Stanford Junior University
The patent was later licensed to Nuytco Research Ltd. around 1990.
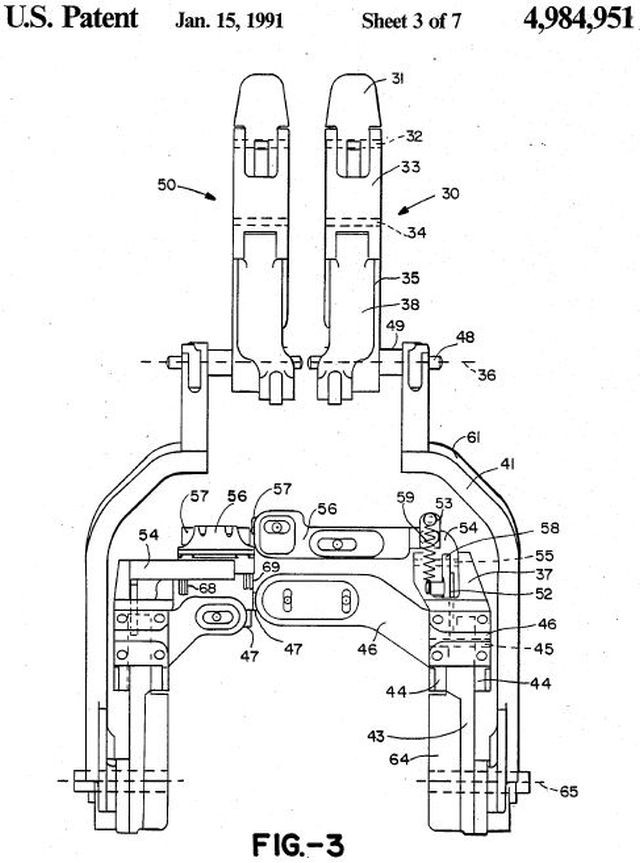
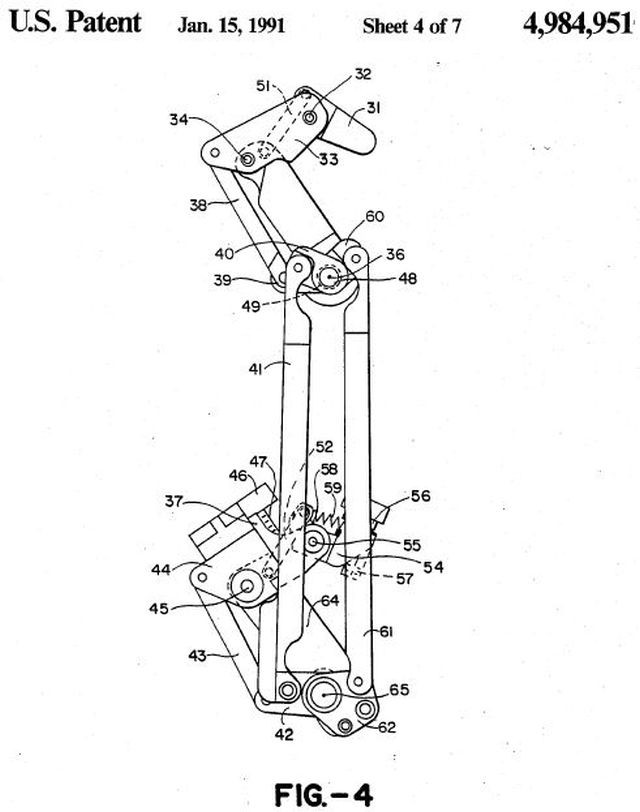
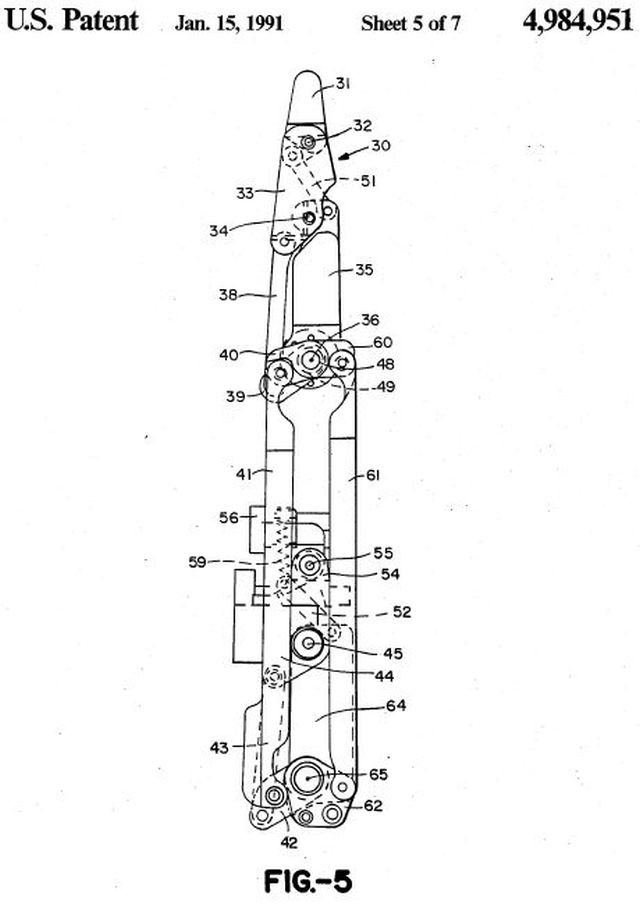
A generally anthropomorphic prehensor having at least two mechanical finger apparatus which interface directly with an object being grasped by apparatus of mechanical linking and control mechanisms operatively connected to the operator's fingers. Each mechanical finger has at least two finger links adjacent one another, each finger link independently rotatable about parallel axes in a plane of movement in response to movements of the corresponding phalanges of the operator's fingers. The mechanical prehensor is particularly useful in hostile or hazardous environments such as outer space, underwater, nuclear reactor sites or other hazardous environments, since the mechanical finger means are external to the operator's hand and may be constructed from suitable materials which are unreactive with the hostile environment, while the operator's hand and mechanical linking and control components may be sealed from the hazardous environment by means of a suitable protective shroud.
BACKGROUND ART
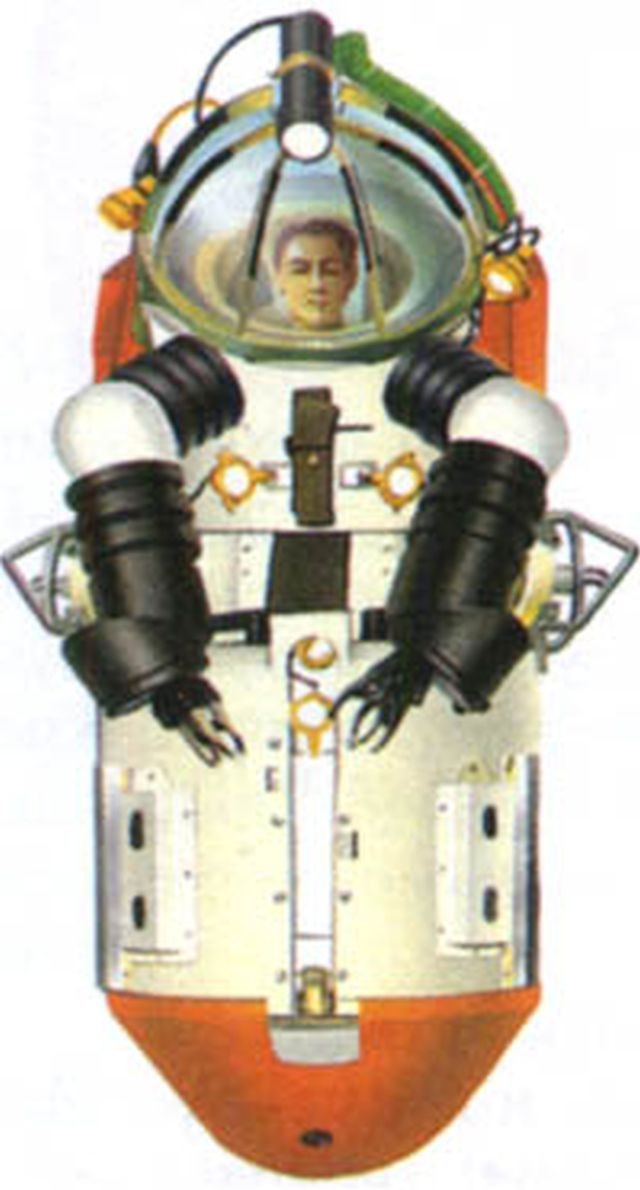
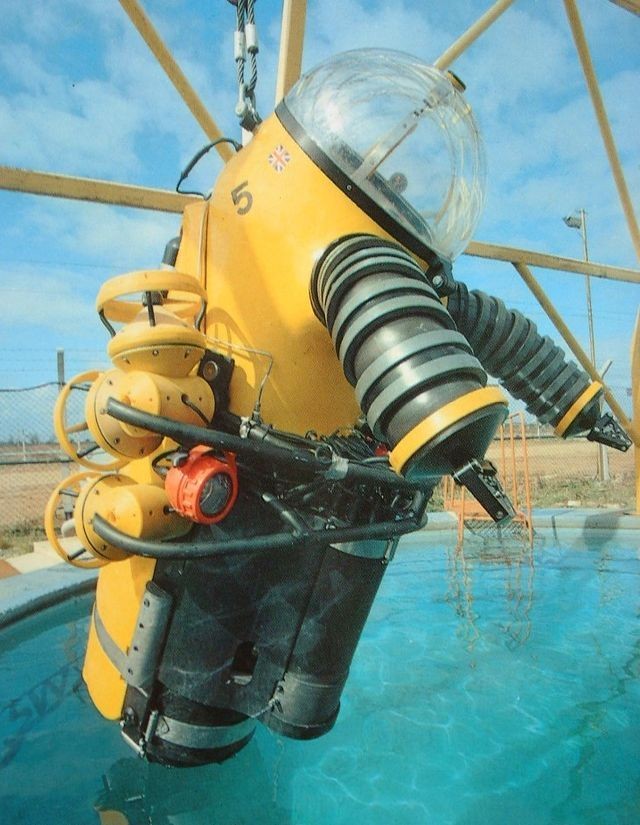
Manipulation means resembling crude pincers have been used in connection with diving suits for deep sea operations. The "Jim Suit", manufactured by UMEL of Farnborough, England, for example, has rudimentary external pincers for grasping which are mechanically actuated by hand movements, and it provides a gas-tight shroud around control mechanisms manipulable by the operator's hand. The pincers are claw-like, having two opposed finger means rotatable about a single axis in generally the same plane of movement. Mechanically actuated pincers of this type have some utility in grasping objects in hostile environments, but they achieve only a clamping-type grasp, and thus they provide limited external dexterity and manipulation.
Space suits developed for extra-vehicular activities in outer space typically have gloves for covering the hands of the space explorer. Due to pressurization inside the space suit and gloves, however, the gloves become very stiff during extra-vehicular activities, resulting in limited external dexterity and excessive hand fatigue.
Robotic manipulation devices having a plurality of finger means simulating human finger motions are currently being developed which may have some application in hostile environments. Robotic manipulation devices having multiple fingers capable of executing multiple degree of freedom movements are typically controlled electronically and require substantial amounts of energy for operation. While these types of robotic manipulation devices provide a high degree of external dexterity, the energy required for operation and the bulk of the control mechanisms render them impractical for use in many hostile environments.
It is an object of the present invention to provide a generally anthropomorphic prehensor having external finger means mechanically controllable by movements of the operator's fingers.
It is another object of the present invention to provide a generally anthropomorphic mechanical prehensor providing enhanced dexterity in hazardous environments which operates in response to movements of the operator's fingers and has no supplemental energy requirements.
It is another object of the present invention to provide a hand-powered mechanical prehensor which significantly reduces operator hand fatigue and increases operator safety and dexterity in hostile environments. It is yet another object of the present invention to provide a prehensor having at least two external mechanical finger means, each mechanical finger means capable of selectively executing multiple motions in a plane of motion, thus providing enhanced mechanical fingertip prehension and the ability to grasp and manipulate objects in a hostile environment. It is still another object of the present invention to provide a generally anthropomorphic prehensor having external finger means mechanically actuated by movements of the operator's fingers which provides smooth, accurate, sensitive mechanical finger control, and which is reliable and simple to operate.

Selected stills from the above video clip.




With the shroud completed the DLP was ready to place on the spacesuit for testing. But there was a problem. It turned out that not enough attention was given to the ability of extracting the fingers from the control rings for doffing the DLP, and it was never tested with a suit. The Challenger accident [1986] curtailed the project before this could be corrected.
Trivia: John W. Jameson is the same person who designed and built the amazing Walking Gyro!
See other early Underwater Robots here.