1953 – “Franken” Maze-Solving Machine – Ivan and Bert Sutherland
FRANKEN
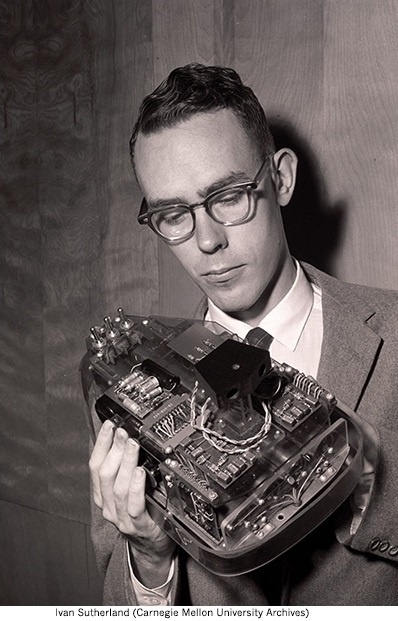
The original Franken maze solver was designed and built by Bert and Ivan Sutherland. I suspect it was built for Edmund C. Berkeley. Berkeley , it appears, had used the early version as a prototype, and engaged his other associates, namely Bob Jensen, Juli Skalski and Stan Skalski in drawing up a revised document suitable for sale as plans, kits, or small-scale production in 1957.

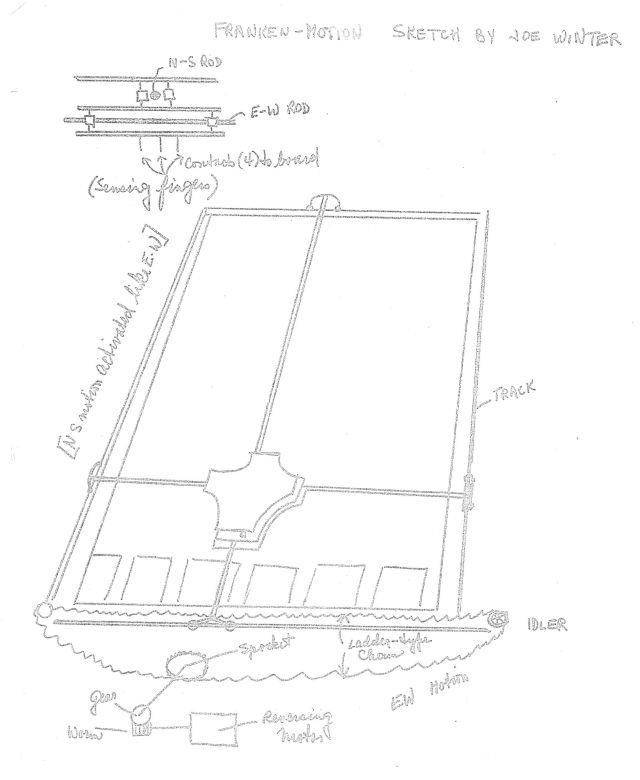
Above pdf has notes Franken made by Bert Sutherland as sent to Ed Berkeley.
.jpg)
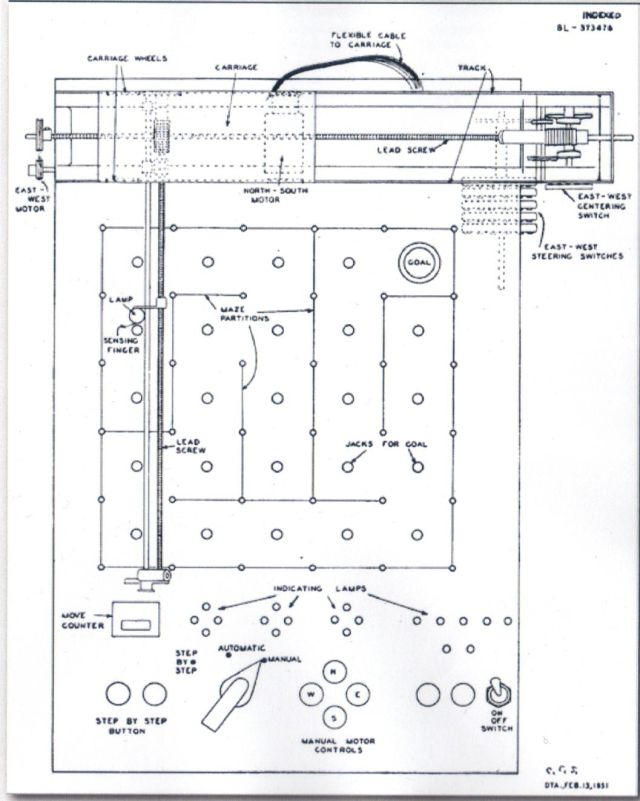
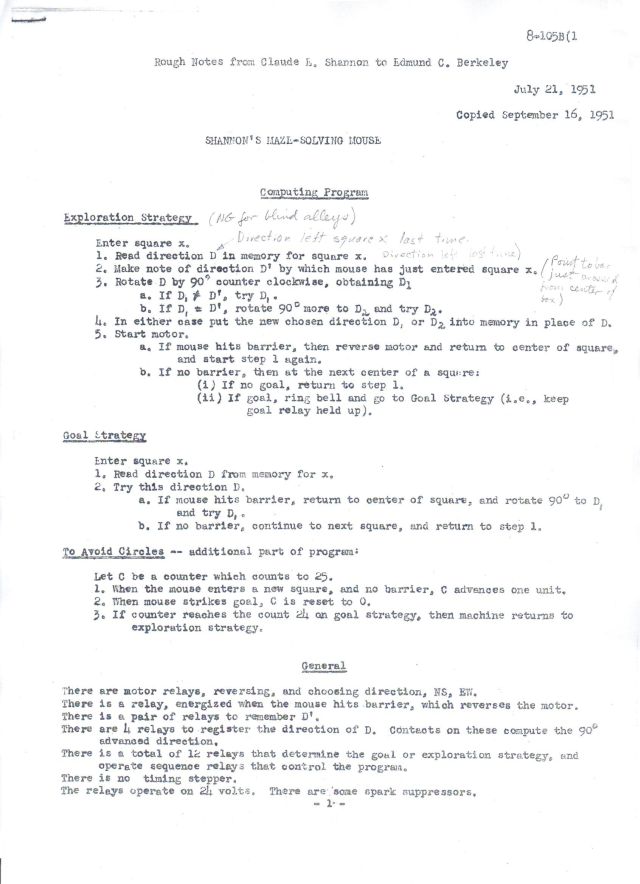
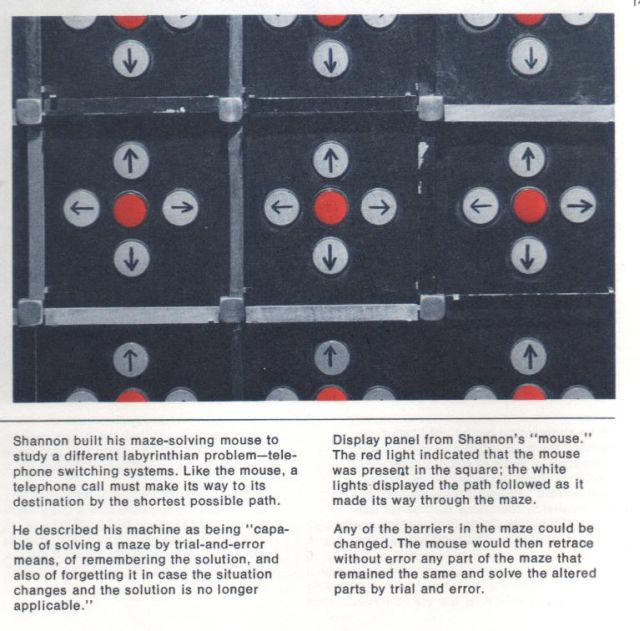
Berkeley's internal memorandum on Franken, The Maze-Solving, Food-Getting, Learning Beast was based on Claude Shannon's earlier 1951 Maze solver using a sensing-finger rathjer than a magnetically controlled mouse.
Ivan and Bert Sutherland first started designing Franken in 1951. The prototype appears to have been built around 1953, if not earlier, according to a letter by Bert Sutherland to Ed Berkeley.. Improvements were was later suggested by Ivan Sutherland (see pdf below).

It was finally handed over to Ed Berkeley in May, 1955.
[Note: Claude Shannon was later Ivan Sutherland's Thesis supervisor.]
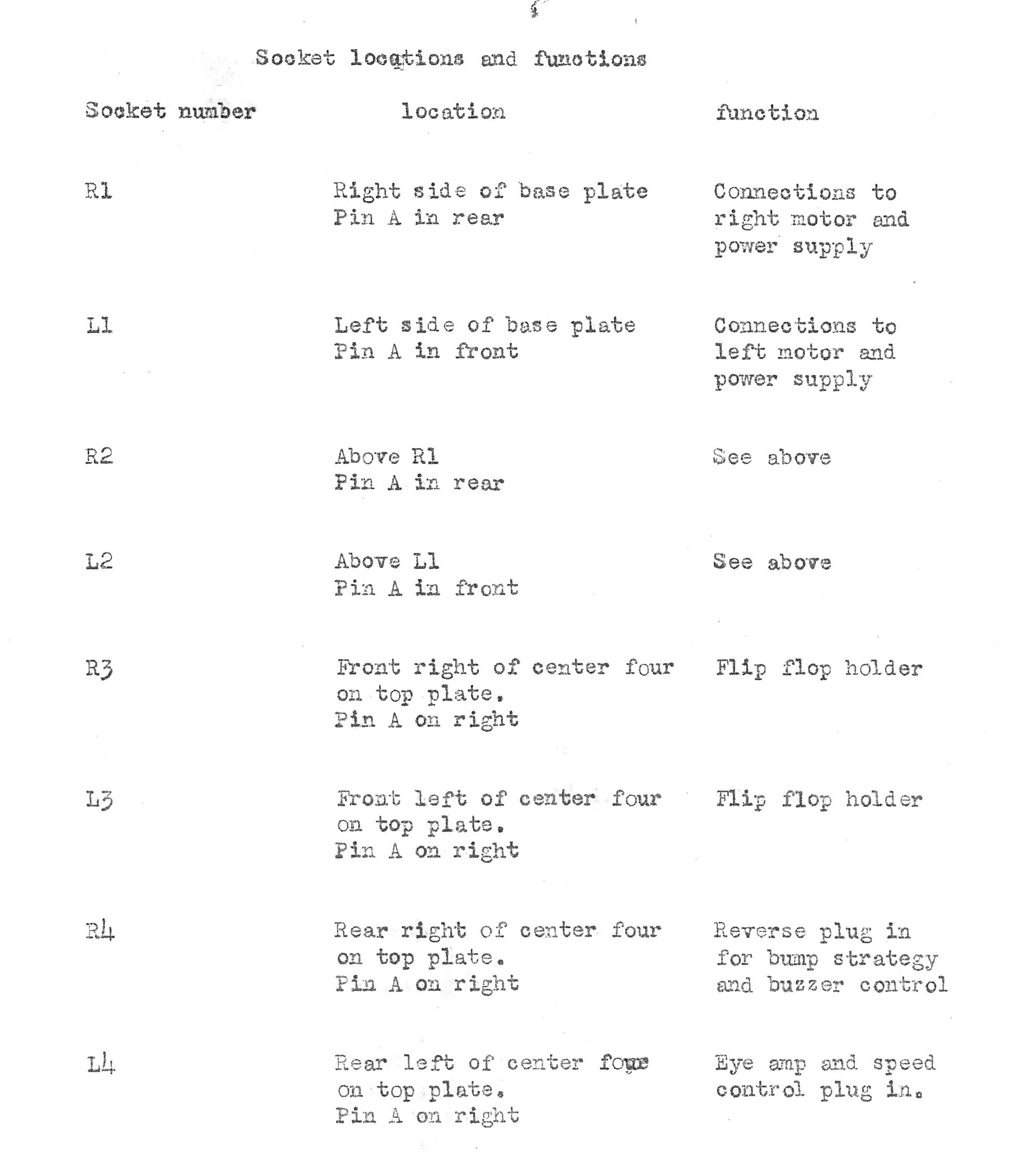
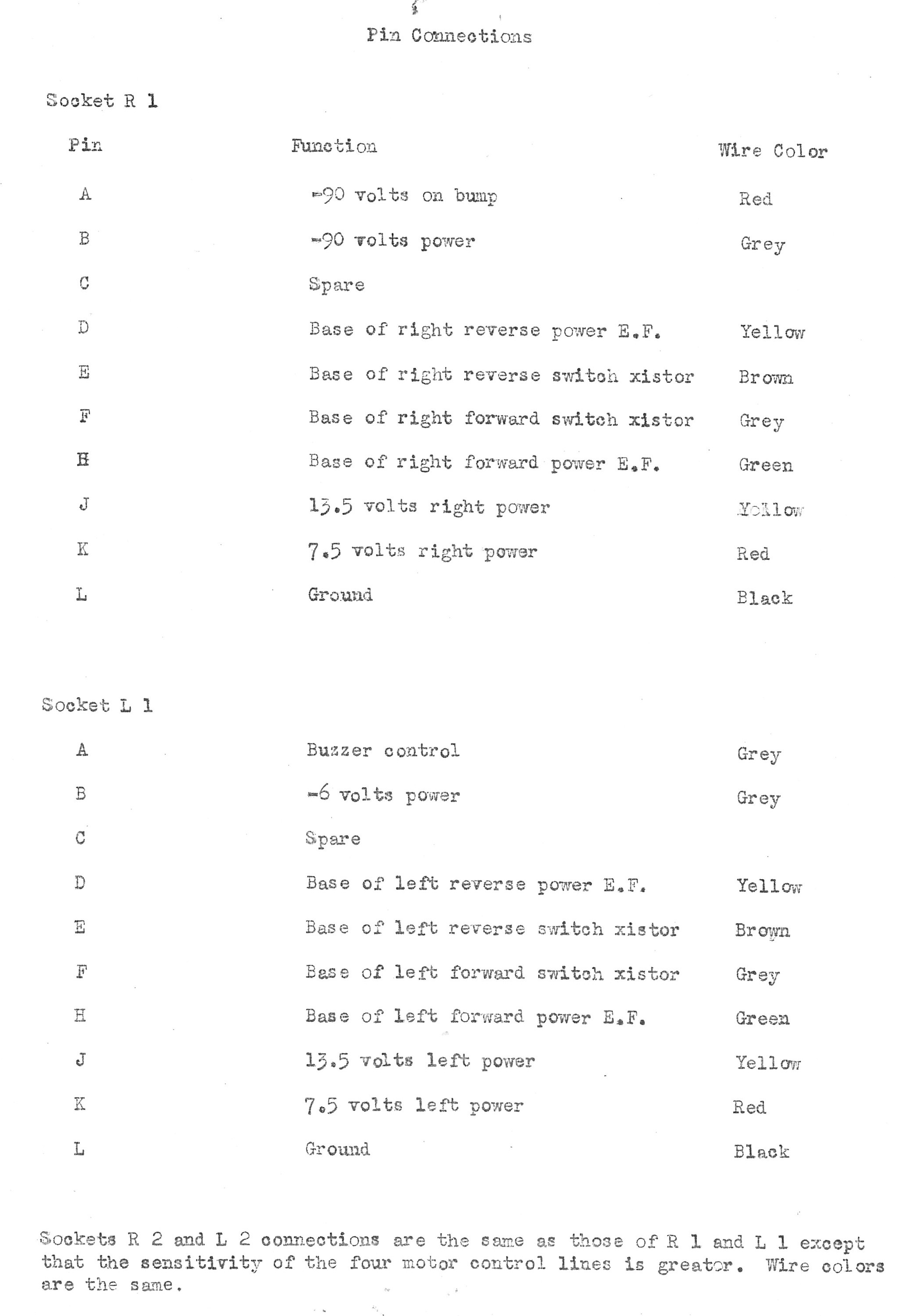
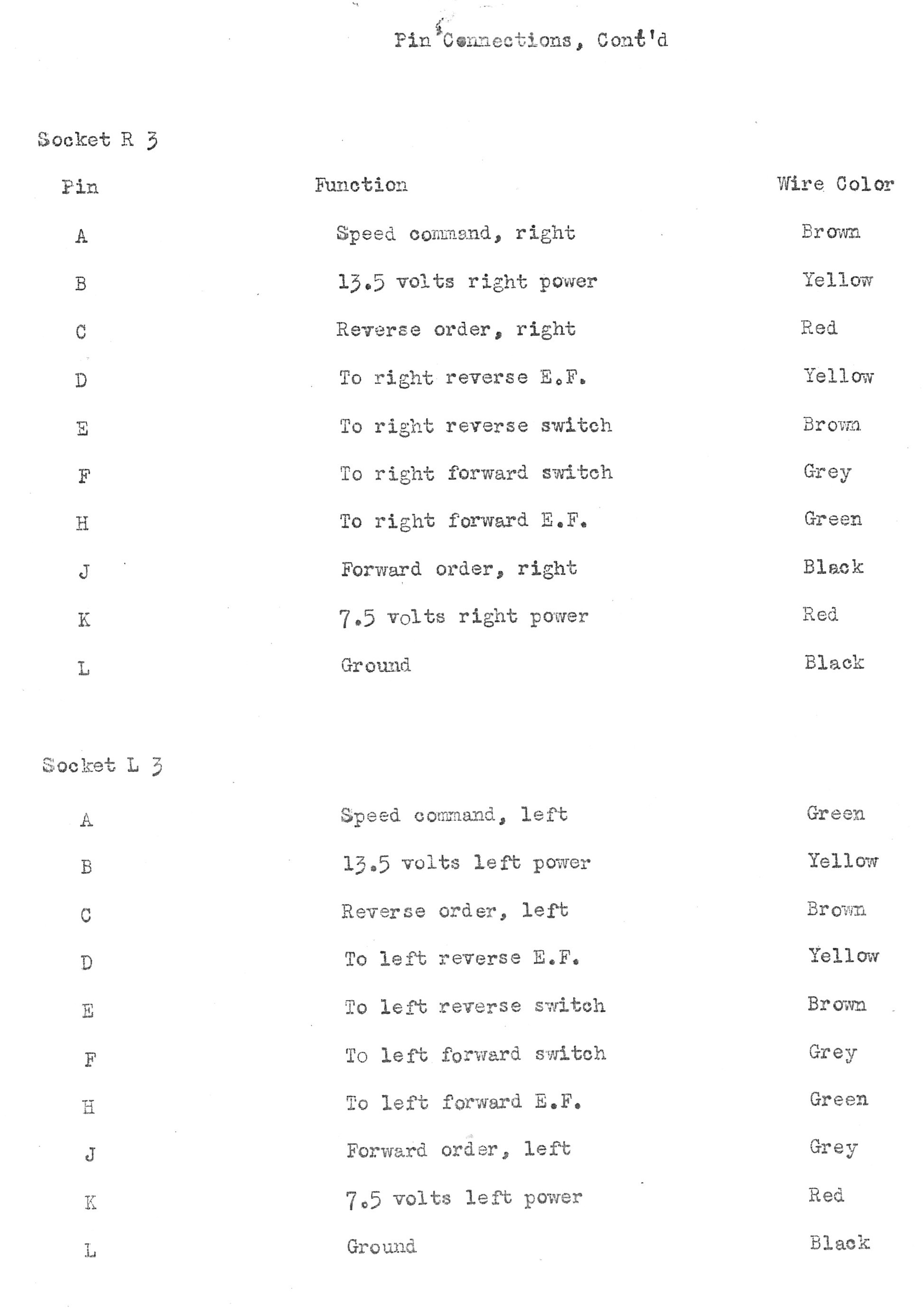
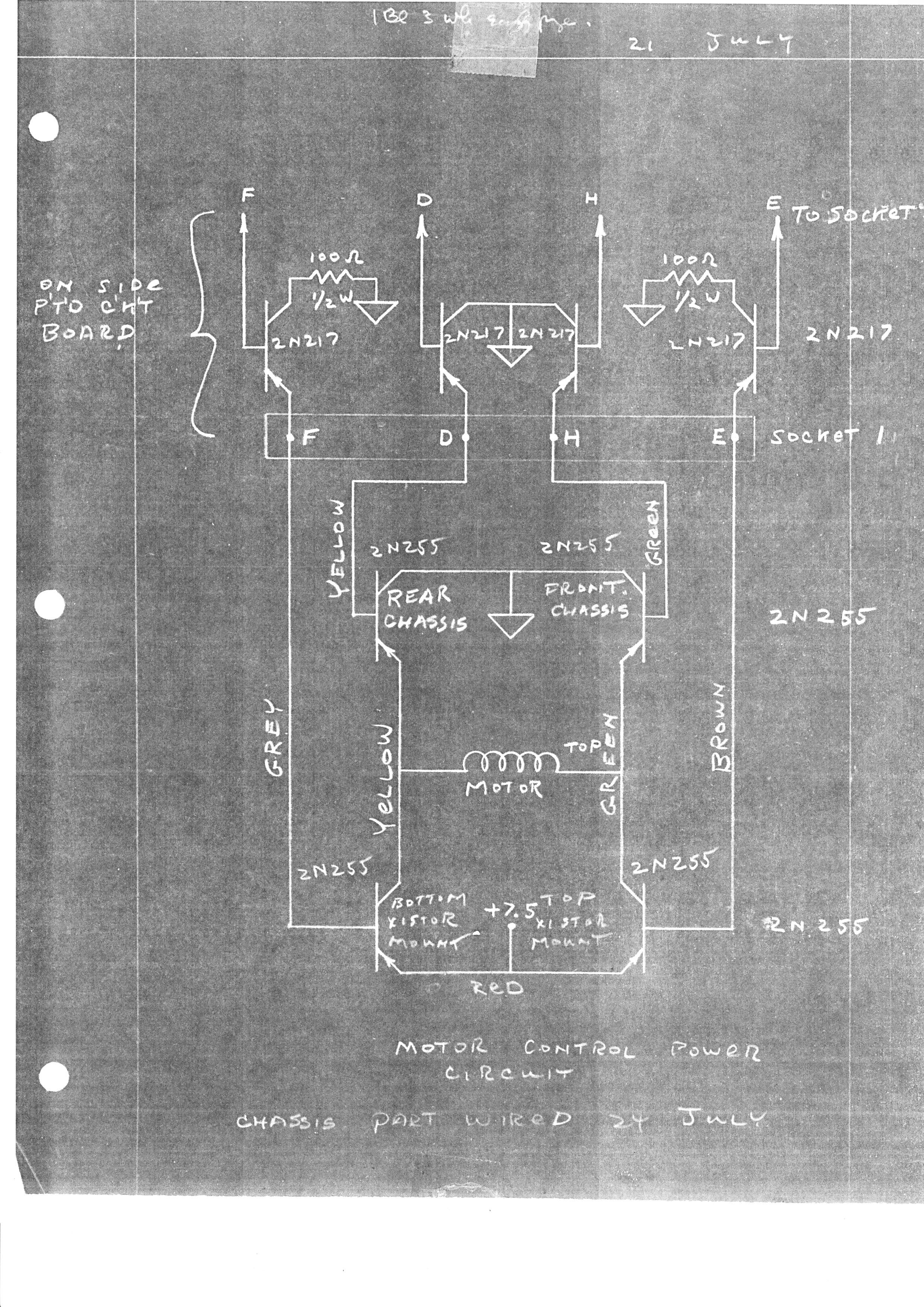
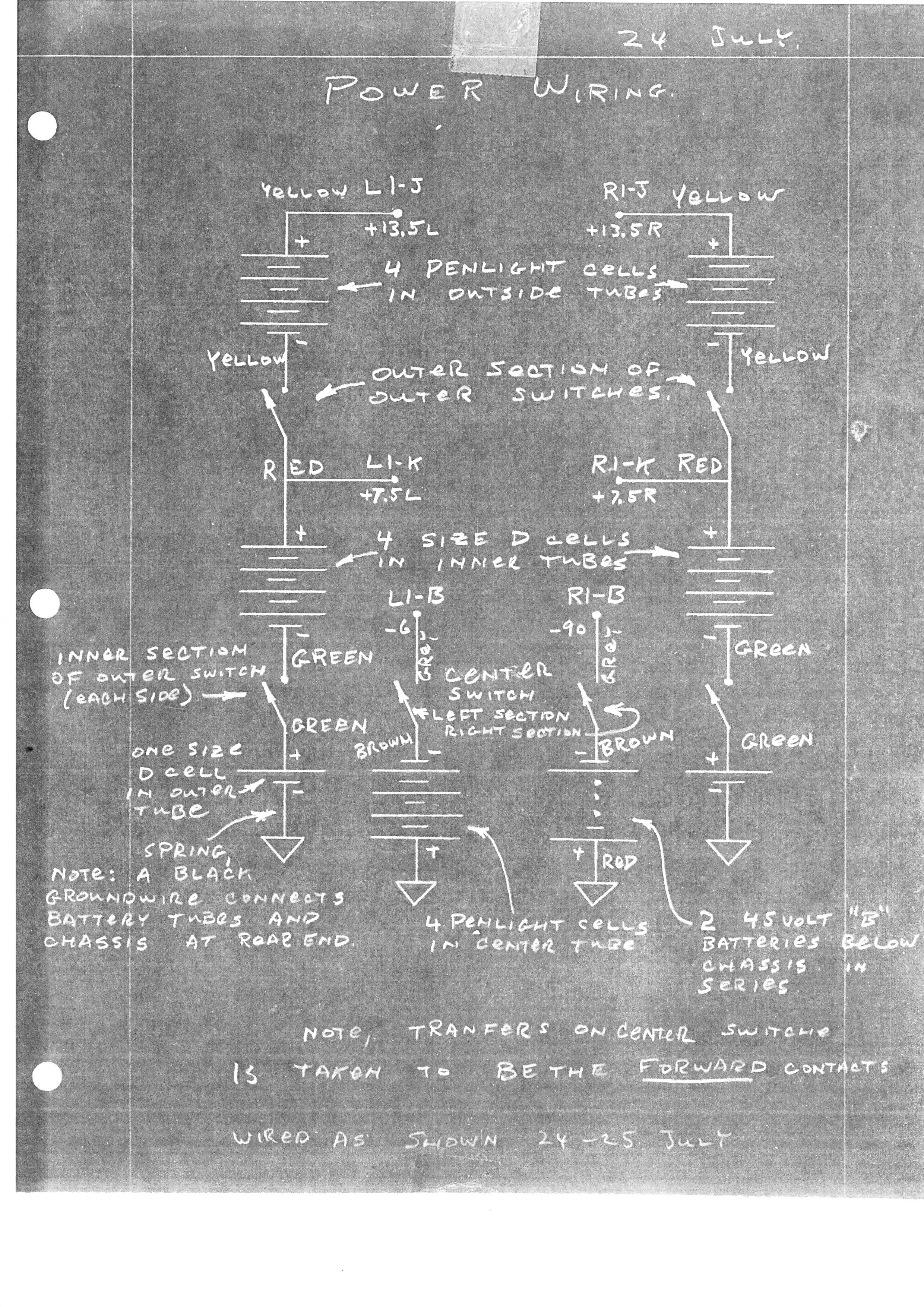
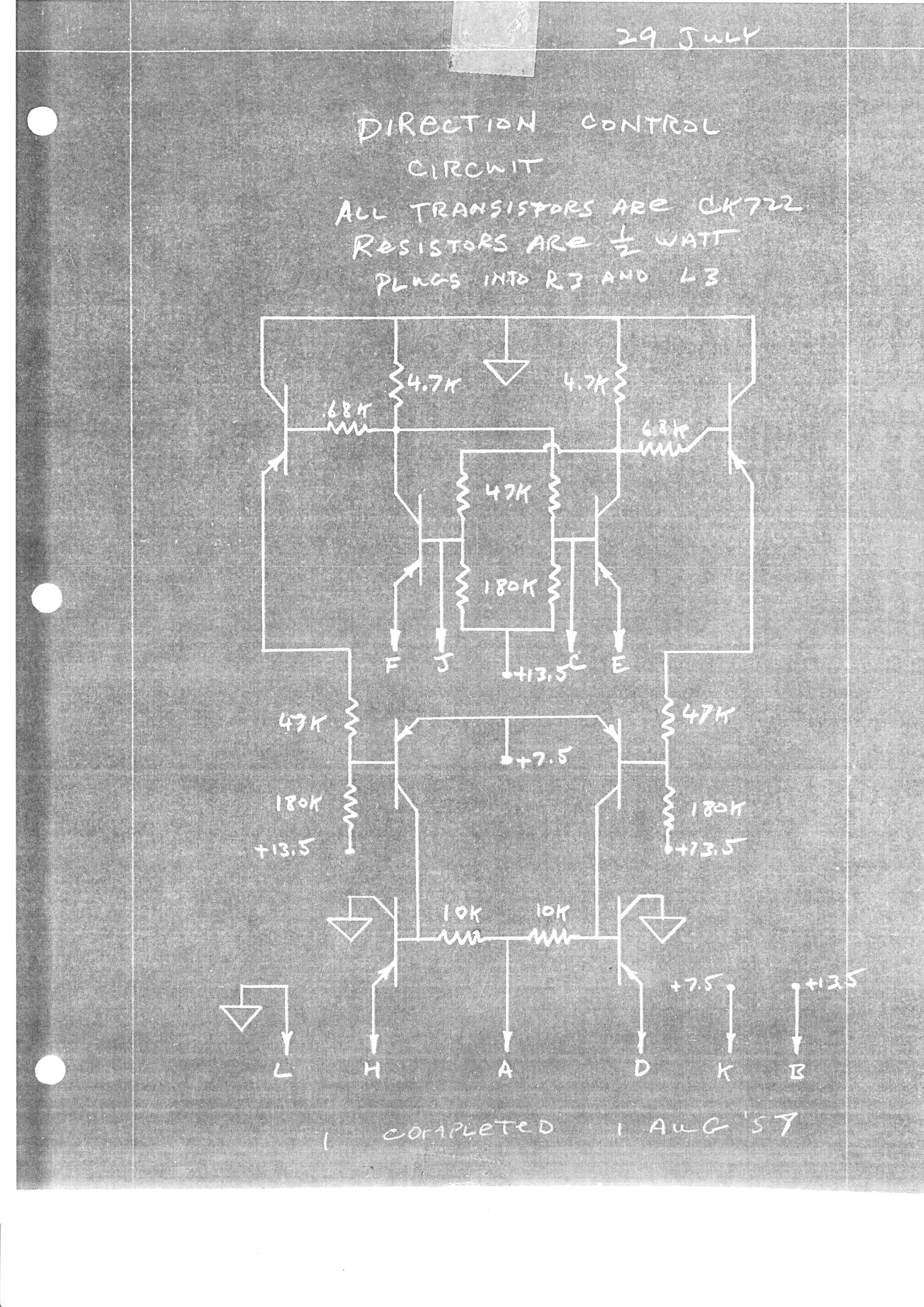
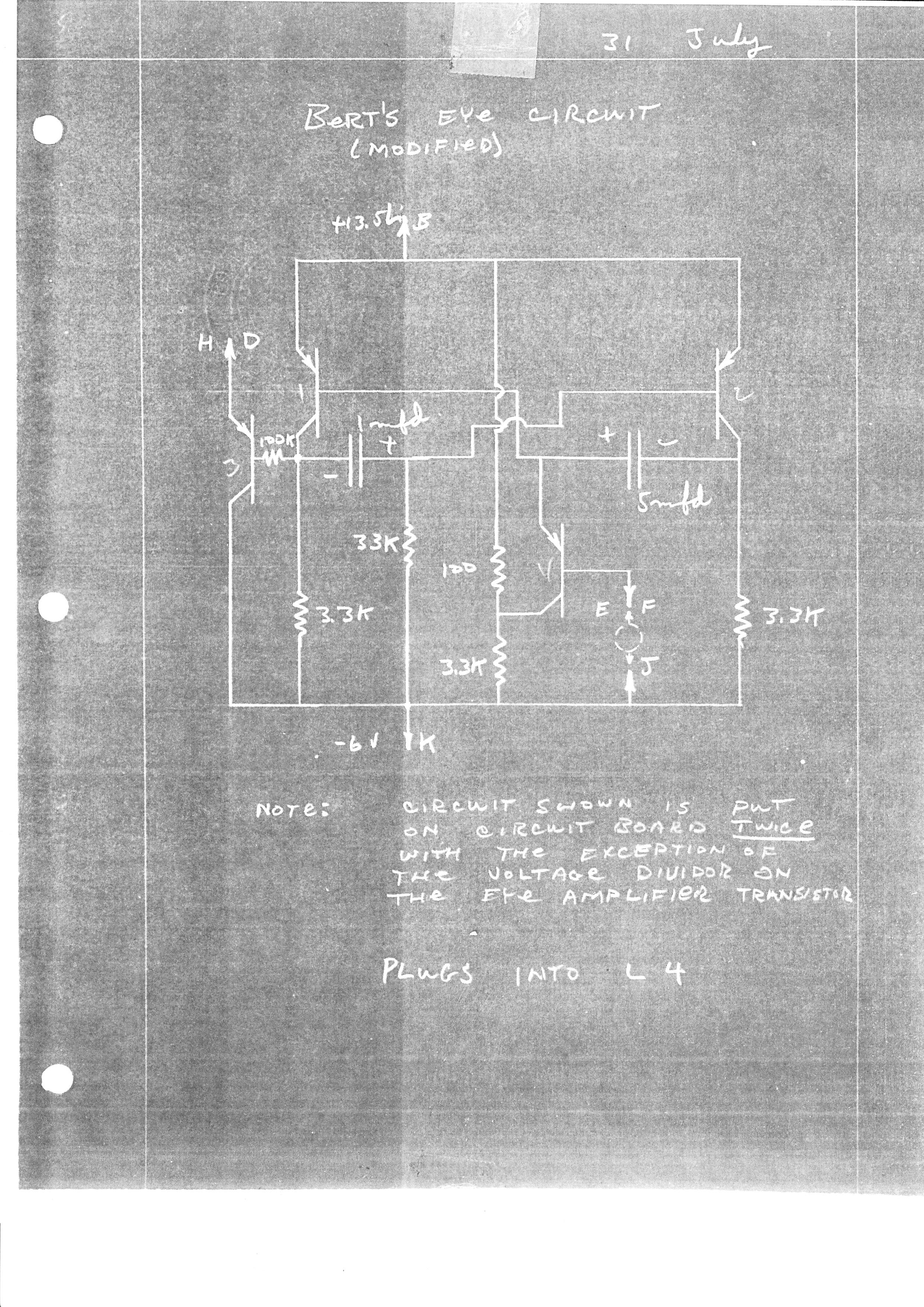
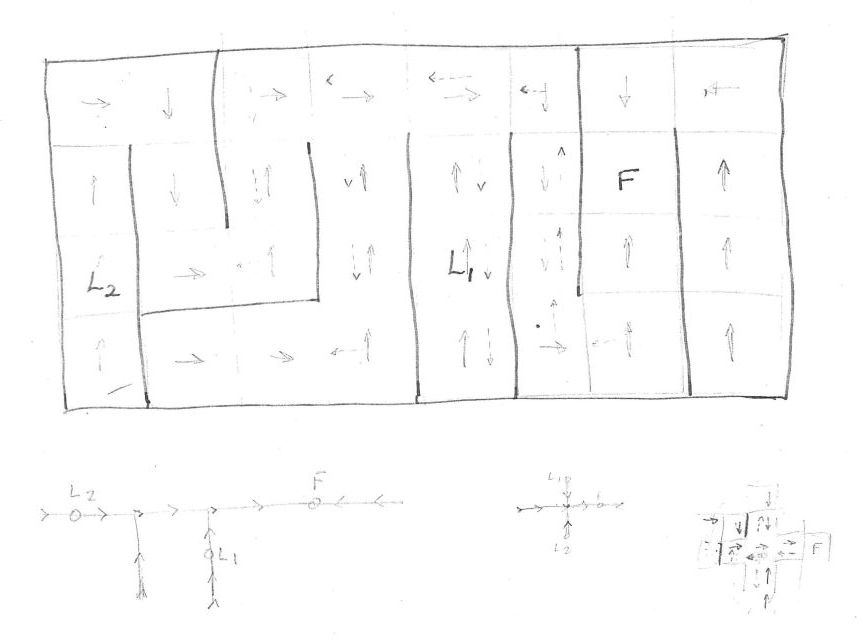
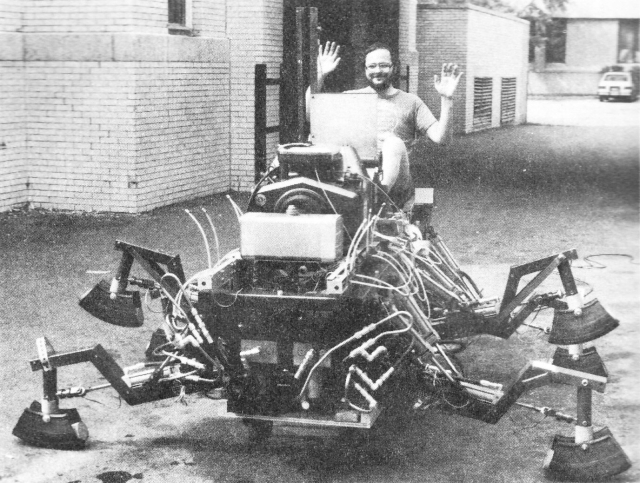
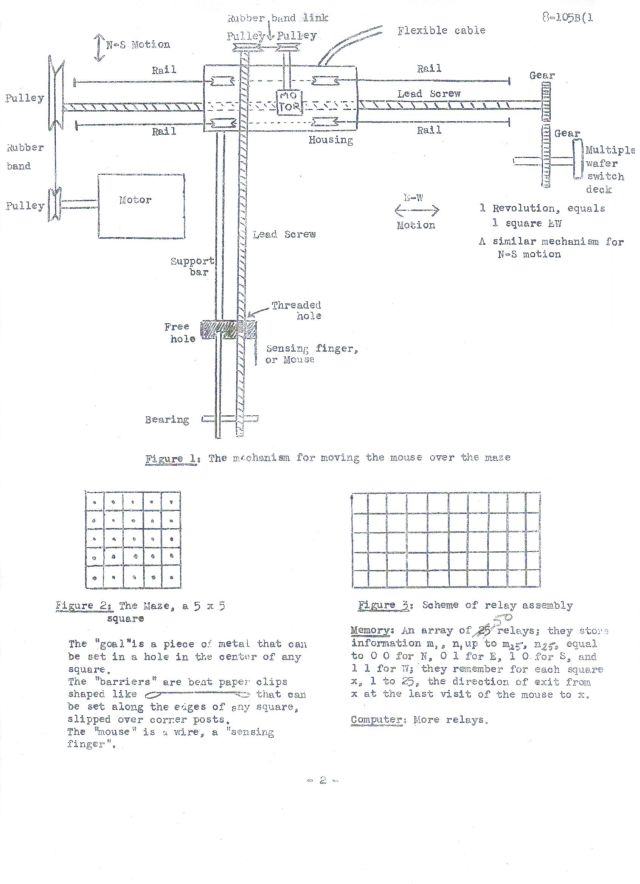
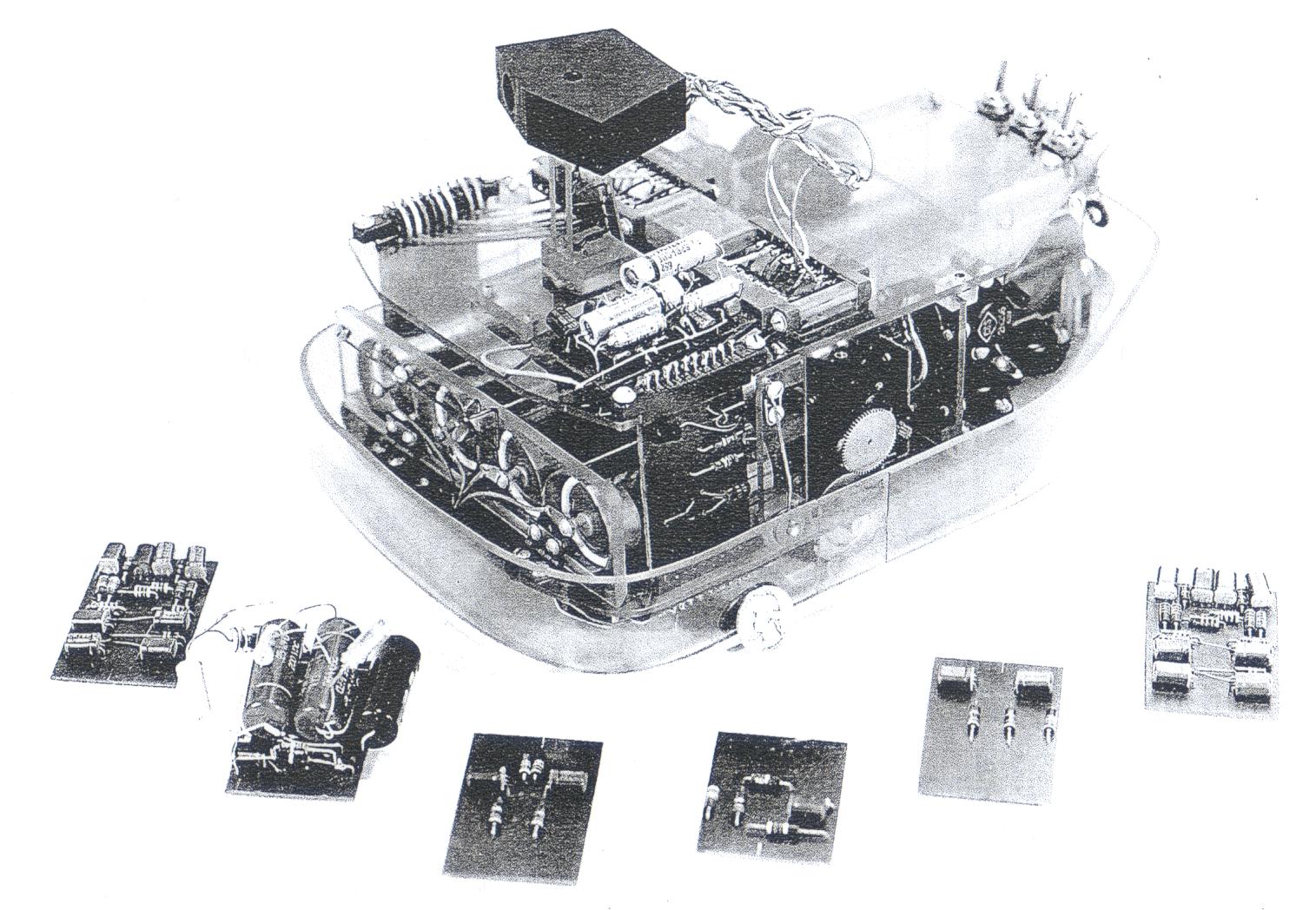
5. Franken (named after Frankenstein) is a maze-solving robot. The maze consists of an aluminum board with 32 squares, around which partitions may be set up in any desired pattern by a member of the audience so as to make a maze. The searching and moving element which explores the maze is a wooden mouse or rat containing a permanent magnet. This is moved by four electromagnets themselves moved by machinery underneath the aluminum surface of the maze. The computing unit consists of some 60 relays; the memory consists of a magnetic drum (called Magdum; see below).
When Franken is completed, a member of the audience will be able to go up to Franken, mark one square with "Food", another square with "Latch One" and another square with "Latch Two". The machine will then be able to learn successively that "Food" is in the "Food" square, and that it has to go to "Latch Two" first and then to "Latch One" so as to "unlock" the "Food" and satisfy its hunger. The machine will also learn the maze, discovering the path to each of the three special squares after exploration. The machine will not be able to distinguish a shortest path from the path which it first finds, but it willbe able to eliminate all blind alleys. Data: 75% complete; finish, laboratory style; reliability, not known; maintenance, will be difficult; our costs so far, about $4,000.
6. Magdum (from "magnetic drum") is a small magnetic drum (materials cost about $50) and associated circuits including some 60 electronic tubes, constructed in order to be the memory for Franken. It has one timing channel and one information channel, and at present can store 128 numbers of 2 binary digits. A member of the audience can select any one of the 126 registers, enter a two-binary-digit number (one of 00, 01, 10, or 11) and find some time later that that number is still there, seeing the number in two neon tubes. This machine was constructed by Ivan Sutherland, age 16, for science fair competitions; and from it he won a $3,000 scholarship to Carnegie Institute of Technology. Data: 99% complete; finish, professional style; reliability, about 97%; maintenance, difficult; our costs so far, about $1,500.


-x640.jpg)
-x640.jpg)
.jpg)