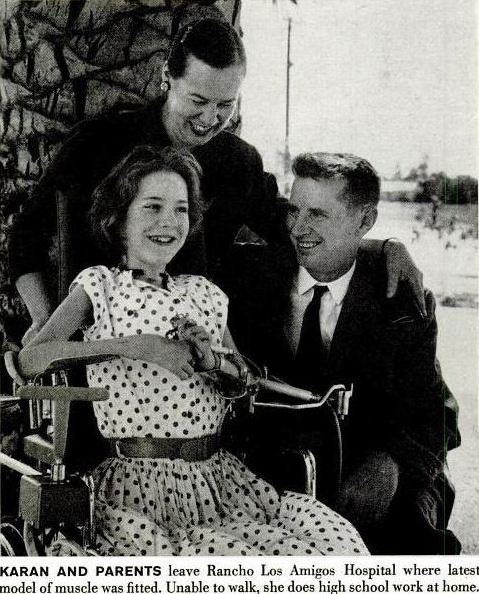
1985 – McAndroid – Jon Barron et al (British)

Popular Science Jul 1985.
Humanoid? Android? Robot?
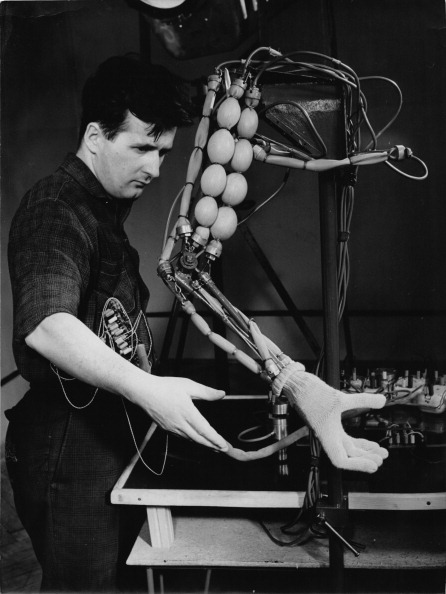
The terminology may not be well-defined, but in any event, Jon Barron, a British engineer, has dubbed his prototype anthropomorphic robot McAndroid the Android. Barron appears with his creation in the photo above.
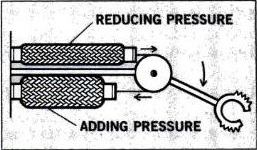
Although he figures that the market for the manlike machine will be the entertainment industry at first, he developed McAndroid as a test-bed for new technology that could appear in robots for home or light industrial use. One possible application is the use of McAndroid's pneumatic valves, which regulate the flow and volume of air into the rolling diaphragm muscles at each of the robot's joints. The simple valve gives fine control of the android's limbs, even though the control system lacks the feedback feature found in industrial robots. Barron's fledgling company, McAndroids Ltd., is also developing software that will program the computer control in a graceful, non-jerky manner, a development that could improve the handling of delicate components on the assembly line.
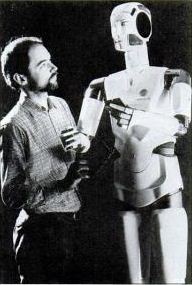
[Photo of Jon Barron with McAndroid]
Popular Mechanics Aug 1985
The day of the android
The movements of robotic limbs often are stiff and halting. McAndroid the Android (right), a fusion of art and engineering, may herald a new era in robotic movement. "Mac" was developed as a sounding board for advanced manipulation technology. He is endowed with pneumatic valves which regulate the flow of air into rolling diaphragm "muscles" at each of Mac's joints.
The valve is simple, yet gives sensitive control of the android's limbs. Limb motions are key to more sophisticated industrial and home-use robots.

[ partial extract from Robotica – Volume 8 – Issue 02 – 1990 ]
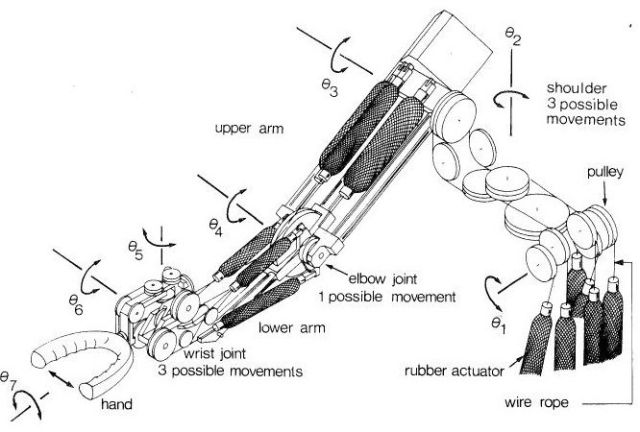
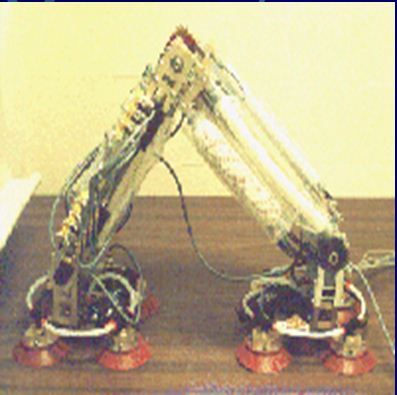
The developers say that anything can be animated by this computer-controlled air-muscle system McAndroids Ltd. (UK) has produced an 'android' robot using air-springs developed by Firestone Ltd. Three air springs were used to power each arm and to give five degrees of freedom.
Also Robotica 1987
p150
RUBBER MUSCLES FOR ROBOTS
The United Kingdom company McAndroids Ltd. of London are said to be one of the first in Europe to explore the possibilities of making the mechanical man of science fiction a reality.
The company's first android greeted visitors to the 'Robots' exhibition at the Victoria and Albert Museum in 1984 with a lifelike computer controlled body movements. Three air springs are used to power each arm, giving five degrees of freedom. The company say that the air springs are highly engineered rubber bellows made by Firestone, and powered by compressed air which is controlled by a specially designed computer-driven valve system. ENDS
p150
Their use as robot muscles is a new development which began in 1983, soon after the introduction of Firestone's 1M1A, their newest and smallest air spring. The actuators are powered by compressed air via silicone rubber tubes running from a compressor up the interior of one leg. Fine pressure control is achieved by computer-controlled valves, designed and patented by McAndroids. The valves work on a mechanical feedback follow-up servo system which enables the arm to move smoothly to its required position, and to have a load compensation facility. Computer programs for the androids are stored on floppy discs. New sequences of movements can be either programmed from a computer terminal, or the android can be directed by a human operator using a joy-stick; the computer will remember the movements and times at the various positions and repeat them to order, running the android for extended periods without supervision.
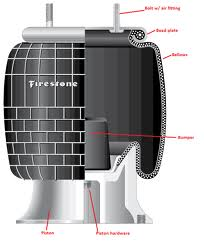
The air springs were highly engineered rubber bellows made by Firestone Ltd.
The Modesto Bee – Mar 10, 1988
These musicians have tin ears
The Associated Press
LONDON — A flutist with rubber lips, metal fingertips and not much else by way of physique is the latest graduate of the McAndroids laboratory in south London.
Being a robot and brand-new, it doesn't have a name yet, but its first public recitals will be given in September, when it goes on display at Taiwan's new National Museum of Natural Science.
The flutist was born in the same cluttered workshop as Tin Twin, the guest keyboard player who thrilled teen-age fans of the Thompson Twins, a British pop group, on its 1986 world tour.
Like Tin Twin, the flutist is a robotized "musician" developed by McAndroids Ltd., a special effects and 3-D animation team composed of two sculptors, a mechanical engineer and a computer artist.
McAndroids' art and technology creations have been on display since 1984 in museums, traveling exhibitions and on TV shows across Western Europe.
The flutist is going to Taichung in Taiwan along with a collection of musical instruments that visitors will be able to play without touching. Set inside glass cases, the flute, organ, tubular bells, 16-string Chinese zither and drum kit are activated by pressing buttons.
"It's very much a hands-on, discover for yourself exhibit." said sculptor Richard Glassborow. "On one level it's entertainment; on another level it's seriously stimulating."
The push buttons give spontaneous but precise control of the robotics that work the instruments. They can pluck out individual notes or create pulsating effects such as vibrato, tremolo or echo
Musical phrases, such as a bass line, can be instantly recorded and the playback accompanied by improvisation. The instruments also can he commanded to play a simple preprogrammed tune.
"It was a choice to make it simple," said Glassborow. "If you make it very rich, they (the public) just stand and look at it. We wanted to make it very friendly."
The flute's robotics are the most impressive, employing the head and pneumatically controlled fingers of a humanoid robot, or android. A valve controls the air that is pumped through the delicately positioned rubber mouthpiece into the lip plate.
The instruments took three months to build and were sold to the designers of the museum's soundproof "cacophony section" for nearly $87,000.
They demonstrate an individual's musical inventiveness and allow those without any musical skills to play music, according to Glassborow.
Tin Twin is a more readily recognizable android, with long arms that flit across the keyboard in simulating such smash hits of The Thompson Twins' as "Doctor Doctor" and "Sister of Mercy."
From a distance, the flashing lights in its eyes and mouth give the impression that it is singing along in the chorus.
McAndroids is made up of the 39-year-old Glassborow; Alan Dun, a 37-year-old sculptor; engineer Jon Barron, 34; and Trevor Piper, a 32-year-old artist. The company has found a niche in a fast-growing European market for special effects.
In 1986, its three robotic "French heads," composed of odd-shaped pieces of steel and glass fiber on top of tall poles, turned real heads at a robot sculpture display in the Georges Pompidou Center in Paris.
Vaguely resembling outer-space creatures, they turn to watch passers-by, stop and stare back, or babble among themselves in jolly jingles. A museum in Glasgow, Scotland, is negotiating for display rights.
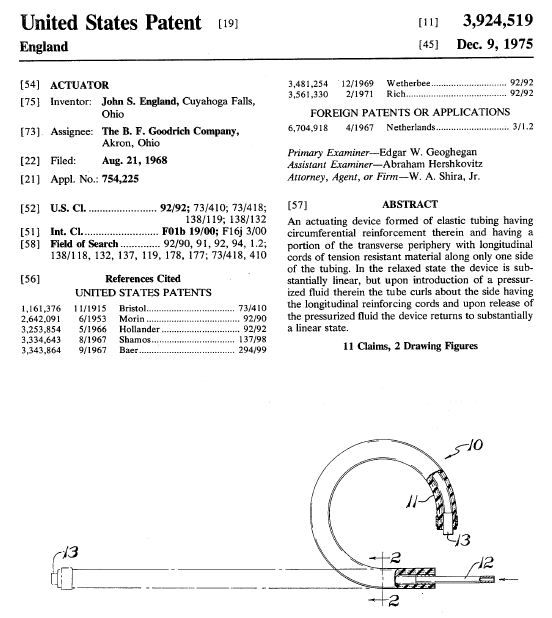
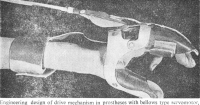
PNEUMATIC SUSPENSION DEVICE R. W. BROWN et al
See full patent here.
Patent number: 2133279
Filing date: Jan 3, 1936
Issue date: Oct 18, 1938
Further information is sought about McAndroid, Tin Twin, and the Flute-playing Robot. Please contact cyberneticzoo.com or post a comment.