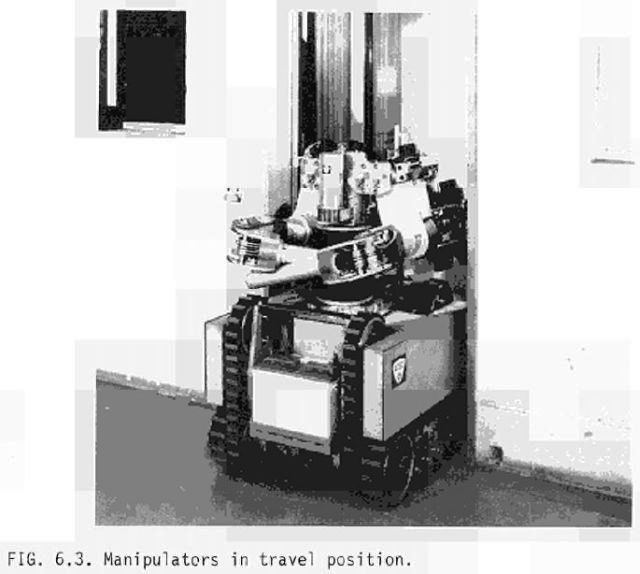
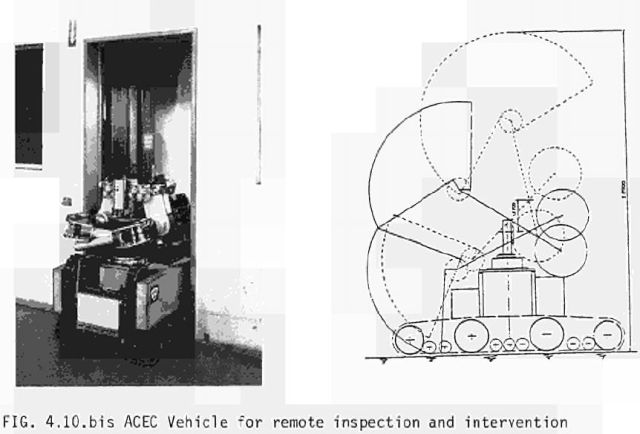
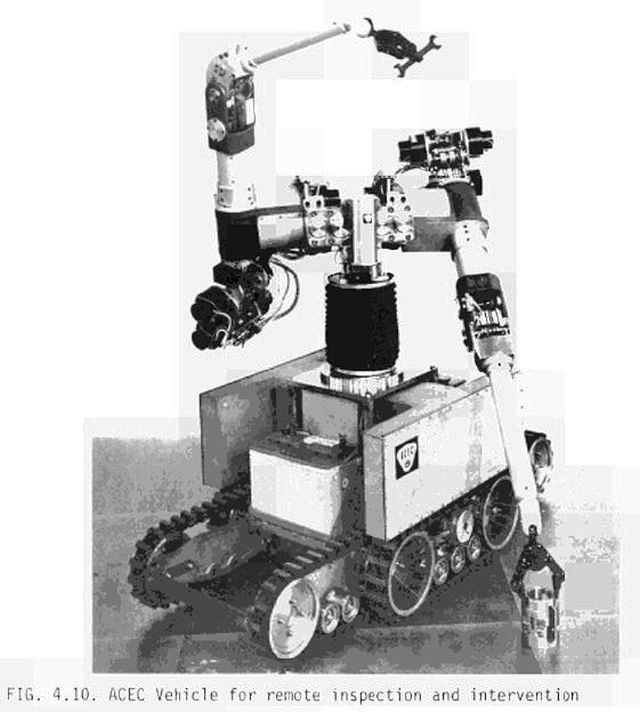
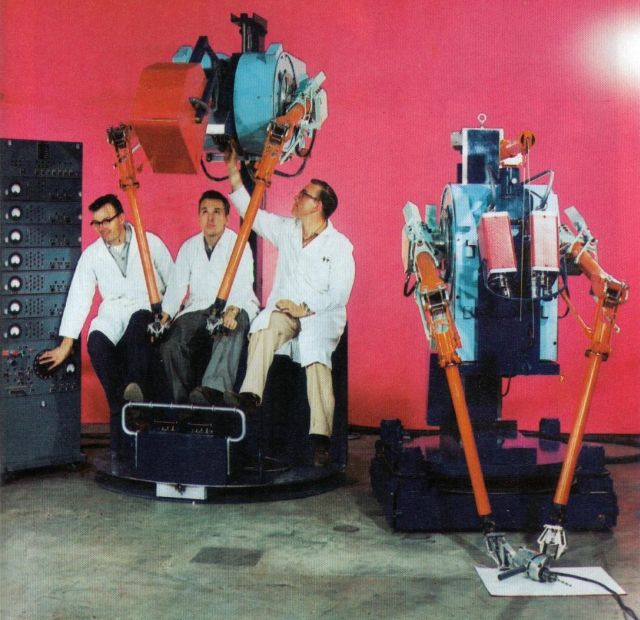
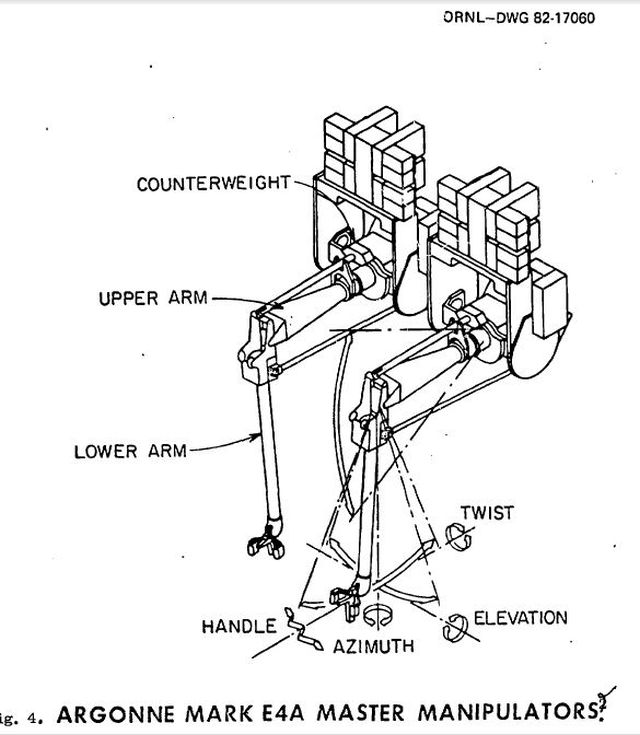
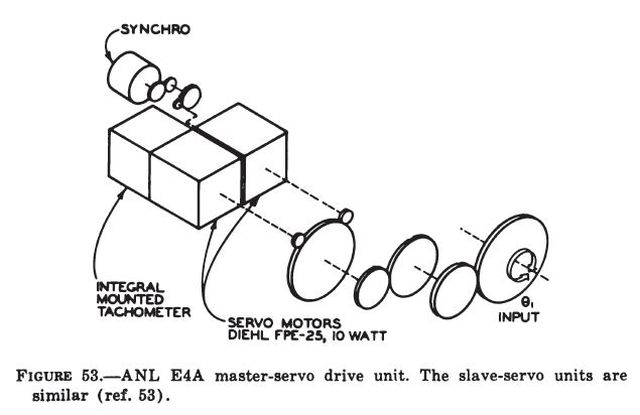
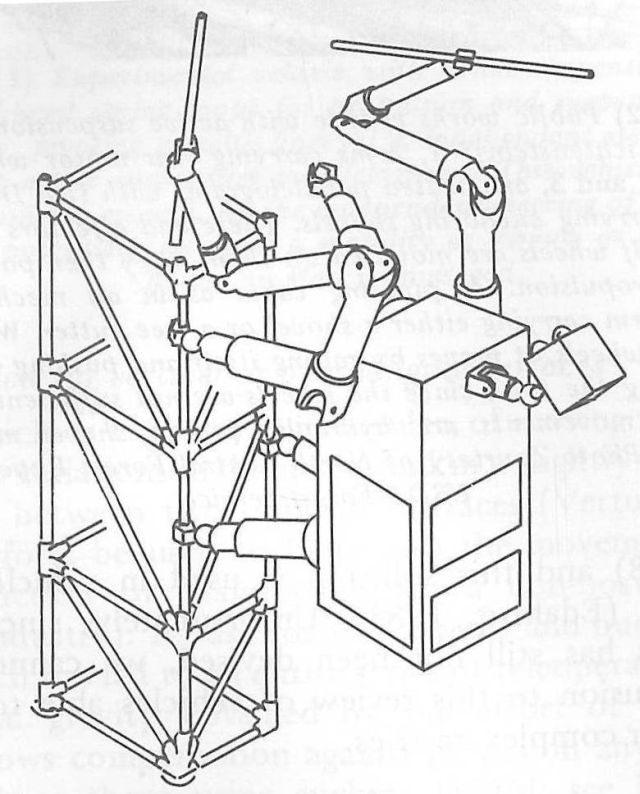
The manipulators are master-slave force feed-back and electrically driven.
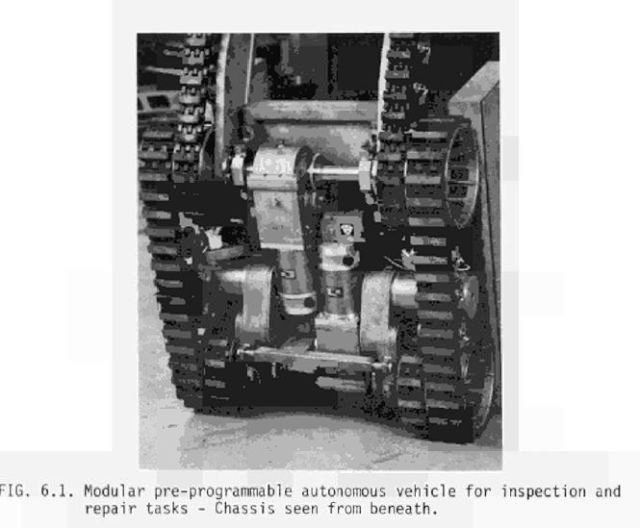
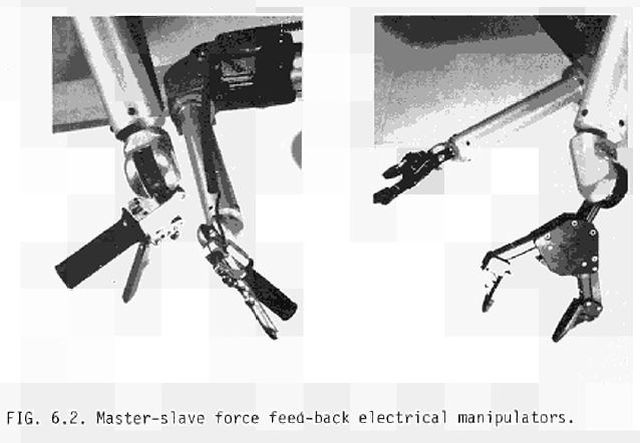
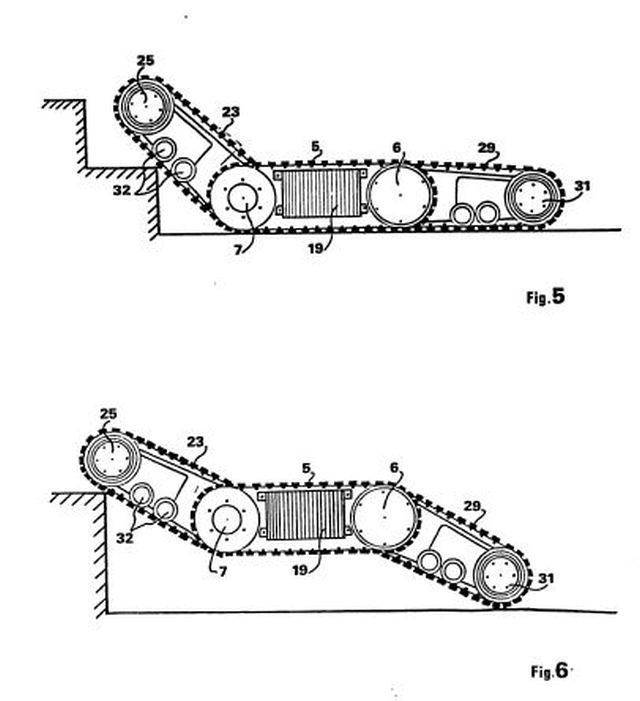
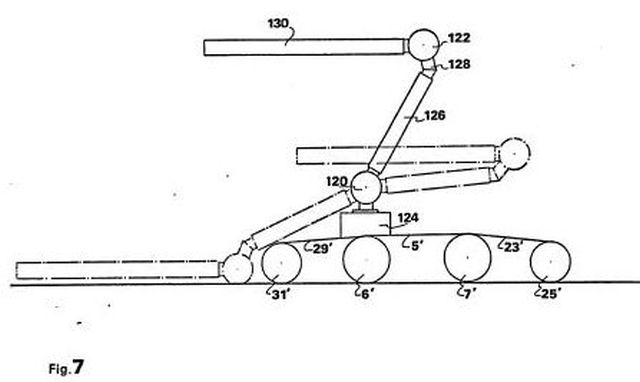
The ACEC Vehicle for remote inspection and intervention has a minimal footprint when the treads are folded up and the manipulator arms are also folded.
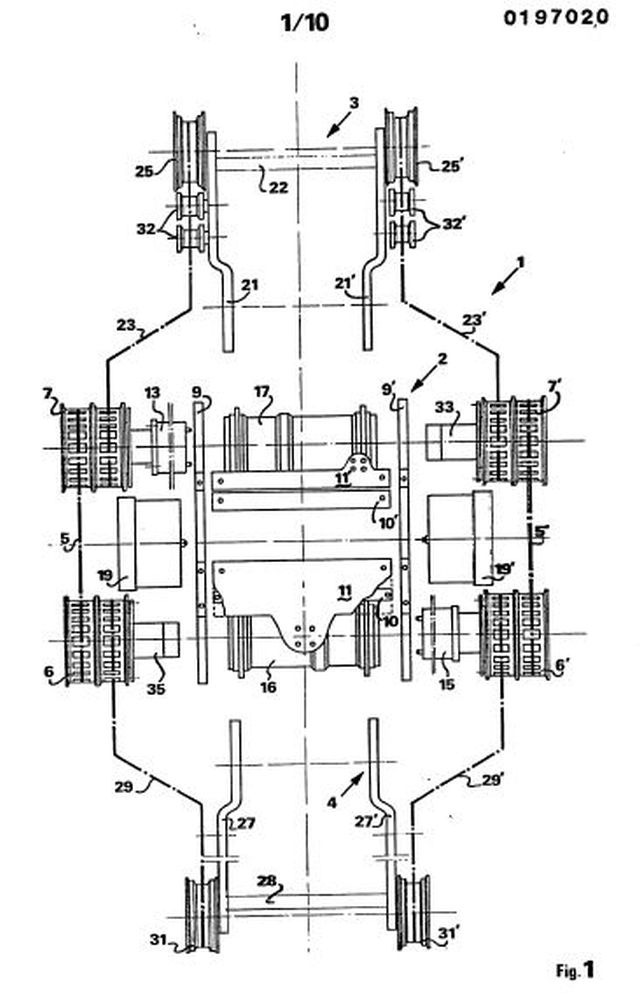
Publication number EP0197020 A1
Publication date Oct 8, 1986
Filing date Mar 7, 1986
Priority date Mar 9, 1985
Inventors Raymond Pinsmaille, Costa Cabral Gaivao Luis Da, Alain Duchene, Dominique Colard
Applicant ACEC, Société Anonyme
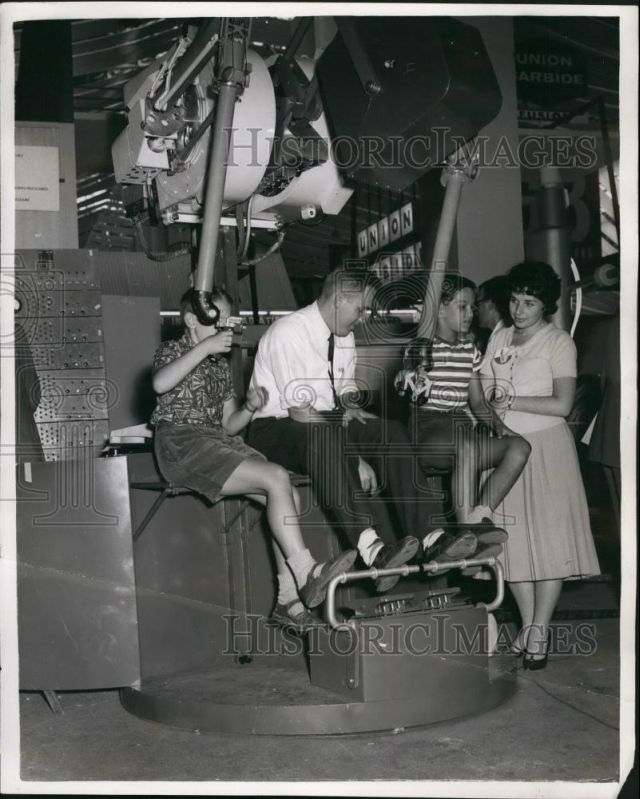
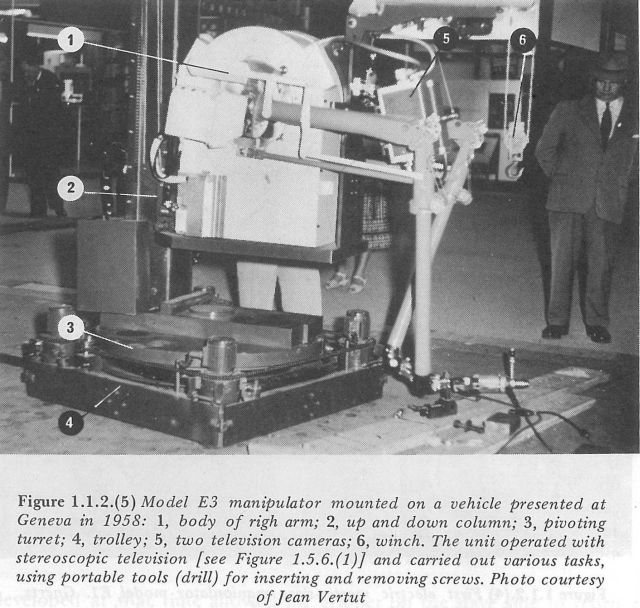
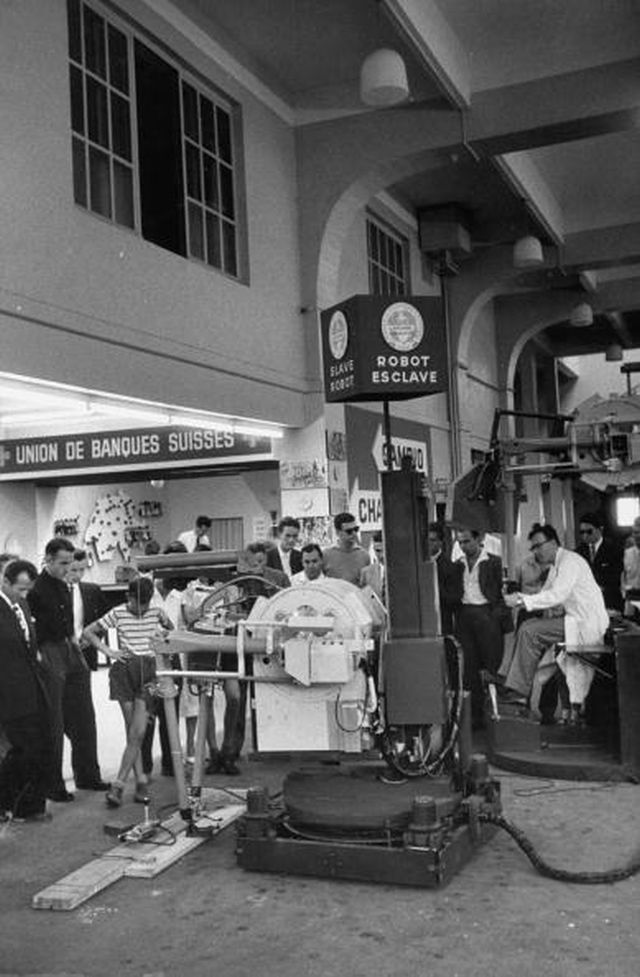
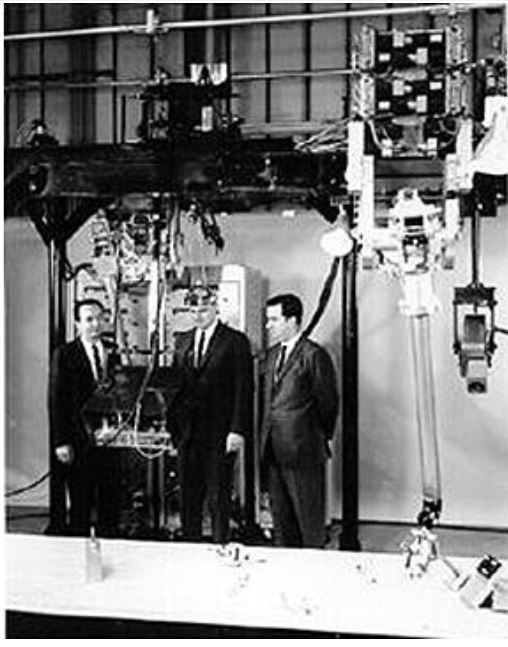
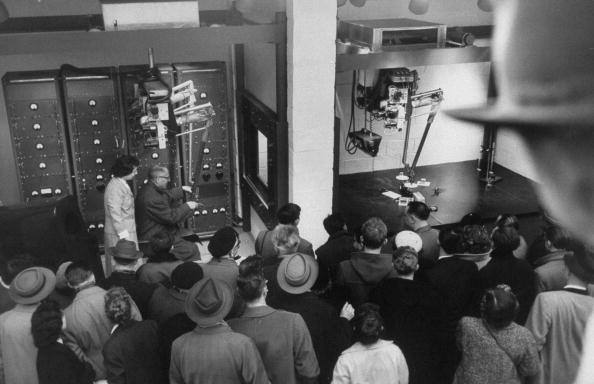
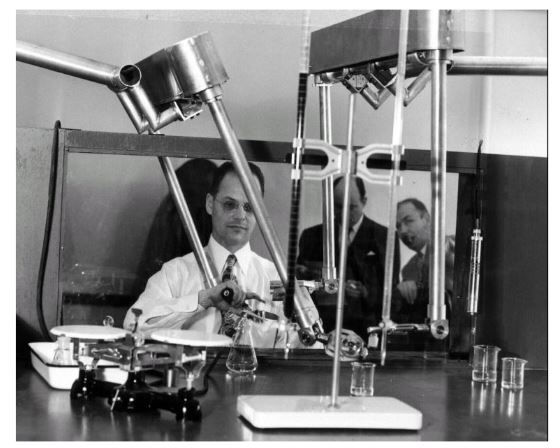
Caption: Robot Demonstrations Of The Atomic Age: Many onlookers – including schoolboys were thrilled by the robot "hands" – dealings with a variety of tasks on one of the stands at the Geneva Atomic Exhibition. The "almost human hands" are used in dealing with radio-active materials behind protective walls and are controlled from a distance with the aid of thick glass windows or with the medium of TV. Photo shows This American made slave robot is designed for the handling of radio-active materials 1/4 and is seen at the Geneva Exhibition. Photo is dated 09-09- 1958.
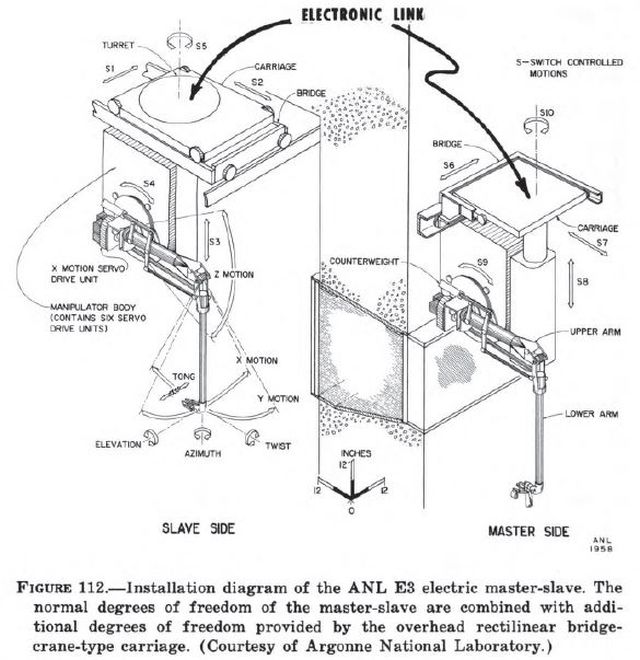
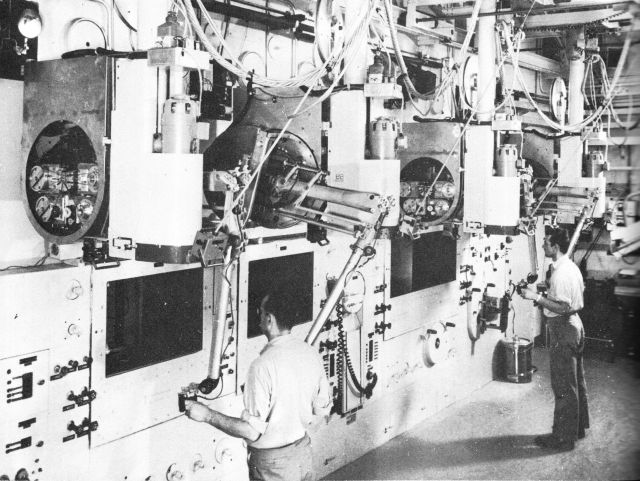
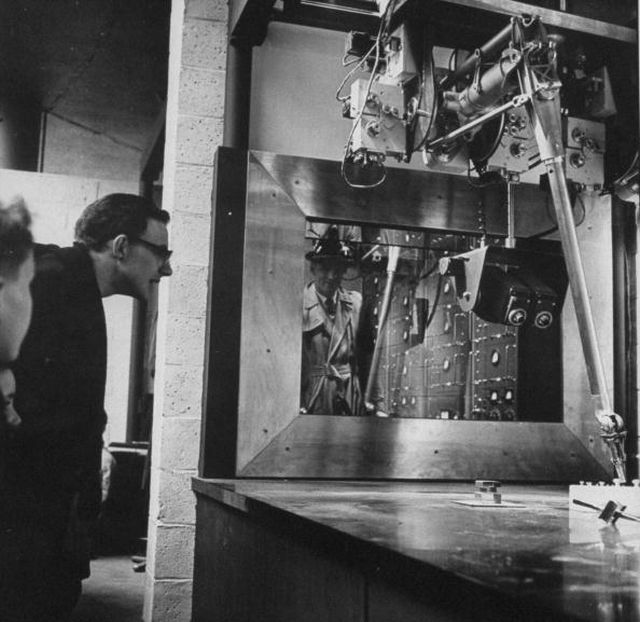
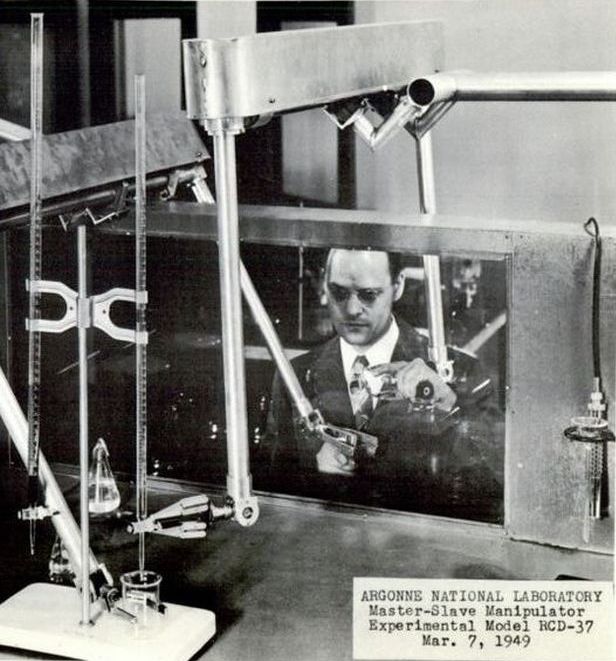
In use at Argonne National Laboratories, located outside Chicago, Illinois, USA.
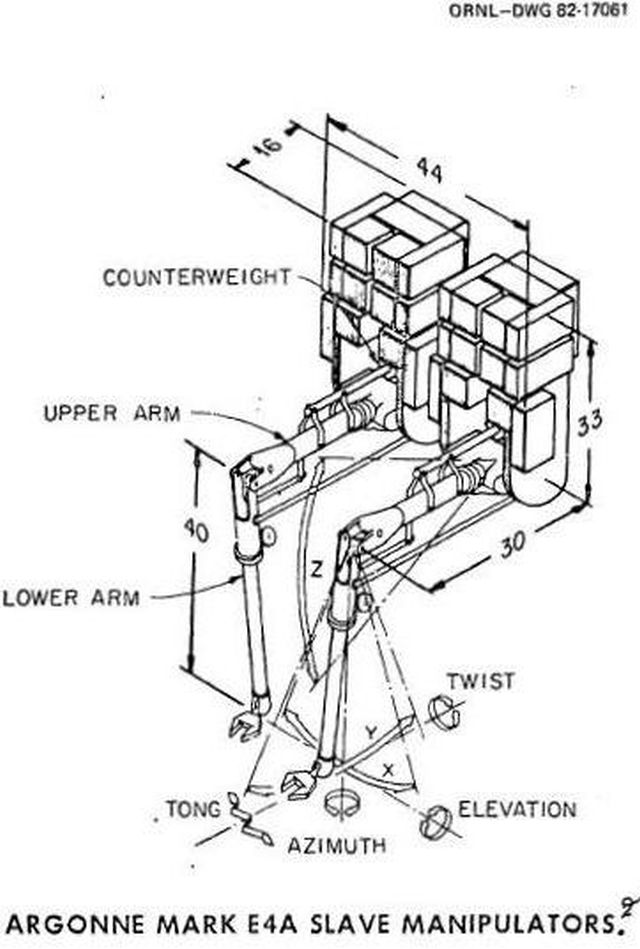
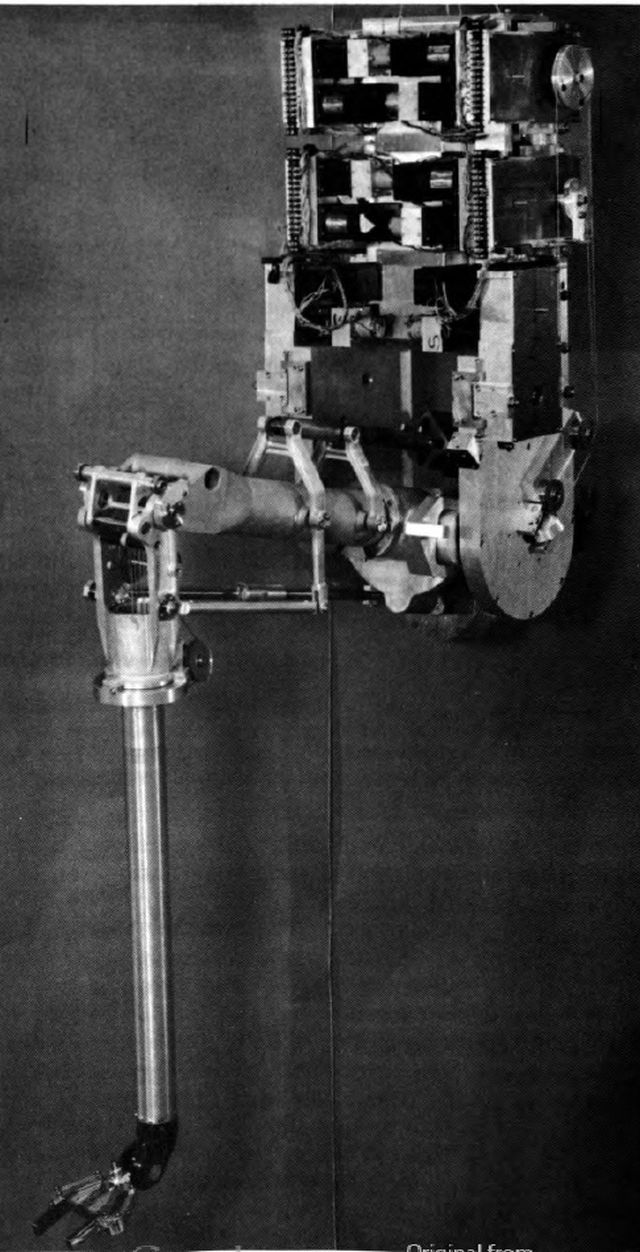
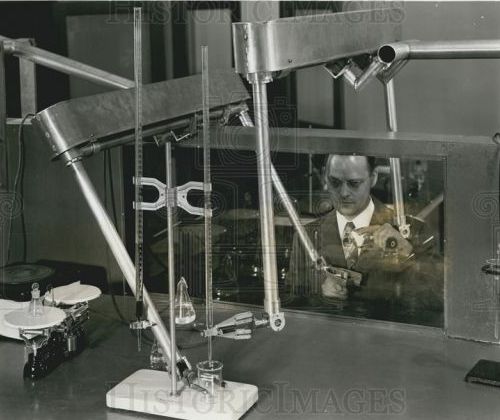
Slave unit.
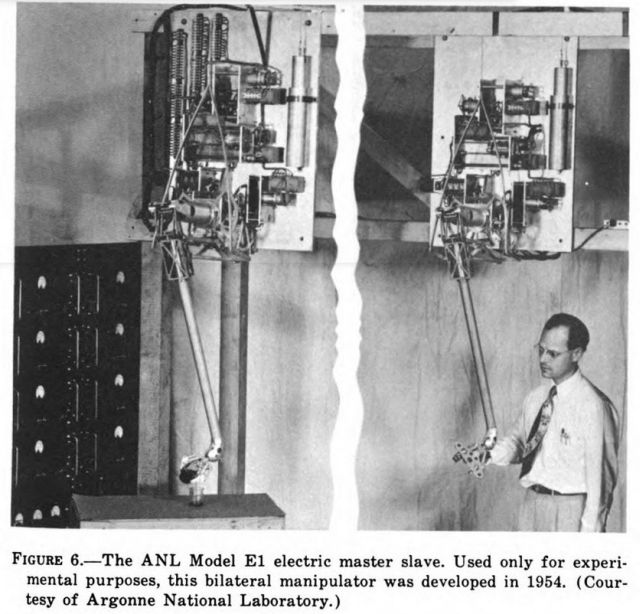
Slave unit in the foreground; master unit in the background.
Source: Above 3 images from Getty.
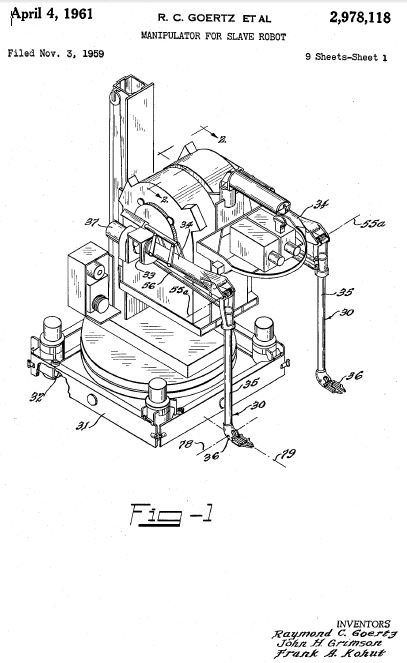
Publication number US2978118 A
Publication date Apr 4, 1961
Filing date Nov 3, 1959
Inventors Raymond C Goertz, John H Grimson, Frank A Kohut
Original Assignee Raymond C Goertz, John H Grimson, Frank A Kohut
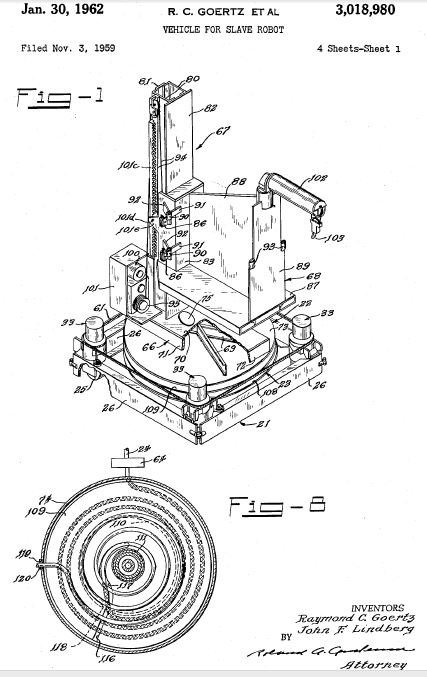
Publication number US3018980 A
Publication date Jan 30, 1962
Filing date Nov 3, 1959
Inventors Downers Grove, Goertz Raymond C, Lindberg John F
Original Assignee Downers Grove, Goertz Raymond C, Lindberg John F
This invention relates to a remote-control manipulator in which slave and master units are electrically interconnected. More specifically, the invention relates to such a manipulator in which two slave units are mounted side by side on a mobile vehicle.
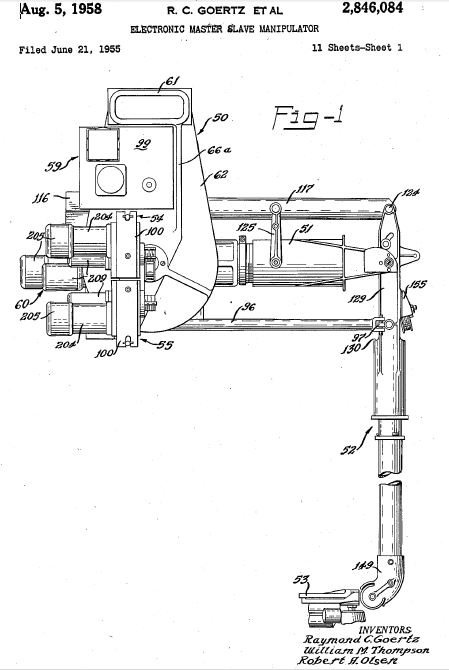
Goertz et al. Patent 2,846,084, dated August 5, 1958, discloses and claims a manipulator having master and slave units electrically connected with one another. 'With such a manipulator the master and slave units can be extensively separated from one another, and the slave unit can be completely sealed in an enclosure.
The present manipulator is an improvement of that of the above Goertz et al. patent in that two slave units as well as two master units are mounted side by side to take advantage of the two hands of the human operator and the two slave units are mounted on a mobile vehicle so as to reach a maximum amount of space.
One desirable feature of the assembly of two slave units and vehicle is that it takes up a relatively small amount of space so that it may be readily maneuverable and have access to the maximum space. Another desirable feature is that the slave units and vehicle should be readily repairable by another manipulator if operation in a sealed enclosure is indicated.
An object of the present invention is to provide a manipulator unit of compact arrangement and size which enable the unit along with a similar unit and a mobile vehicle carrying the units to occupy a small amount of space.
A further object is to provide a manipulator unit that is so constructed and arranged as to be readily repairable.
Publication number US2846084 A
Publication date Aug 5, 1958
Filing date Jun 21, 1955
Inventors Goertz Raymond C, Olsen Robert A, Thompson William M
Original Assignee Goertz Raymond C, Olsen Robert A, Thompson William M
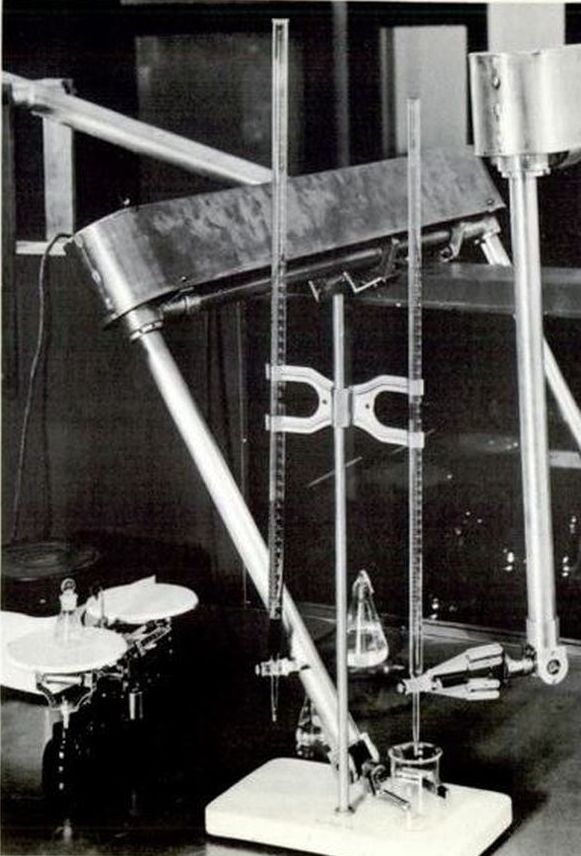
1954 – ElectroMechanical Manipulator by Ray Goertz (pictured)
An early experimental model – this one also showing the head-mount camera controller
Brussels Exhibition – US Pavillion demo.
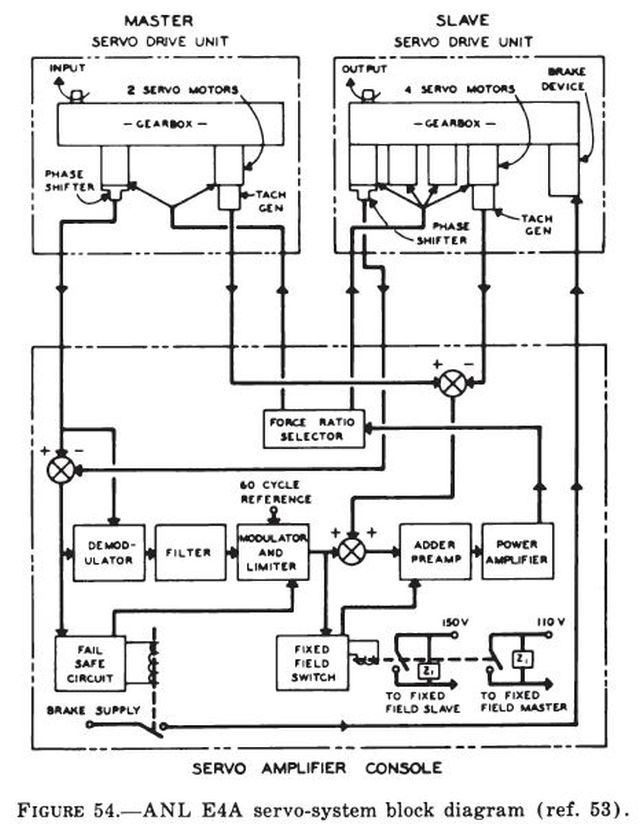
Model E4a Slave unit.
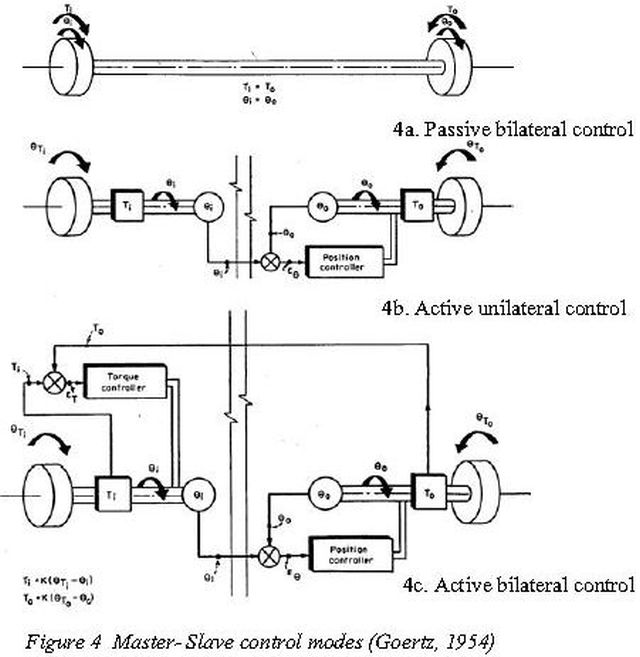
Diagram by Goertz showing the various control modes of Master-Slave arms.
Patent information:
Publication number US2846084 A
Publication date Aug 5, 1958
Filing date Jun 21, 1955
Inventors Goertz Raymond C, Olsen Robert A, Thompson William M
Original Assignee Goertz Raymond C, Olsen Robert A, Thompson William M
Historical Significance:
Goertz first described the force reflection manipulator in 1952 – Goertz RC, ‘A force reflecting positional servo mechanism’, Nucleonics, Vol 10, Part II, pp43-45, 1952. Other remote manipulator systems of the time were either mechanical, hydraulic, or electro-hydraulic, needing to be closely coupled. Sixty years later we are still seeing ideas that this invention spawned. Ideas such as telepresence in areas such as underwater and outer-space.
From 1960, Ray Goertz, who invented electrically remote manipulators for the nuclear industry, together with his team at Argonne Nuclear Laboratories (ANL), were engaged by NASA to specify teleoperator configurations for the Lunar space program. The result is illustrated above.
It should be noted that floating vehicles share one problem. This is their inability to stay immobile relative to the object on which they must act. Hence, they are equipped with docking arms, other than the manipulator(s) directly intended to execute the task, to attach them to the object of their task, whether this is another satellite or an underwater oil platform.
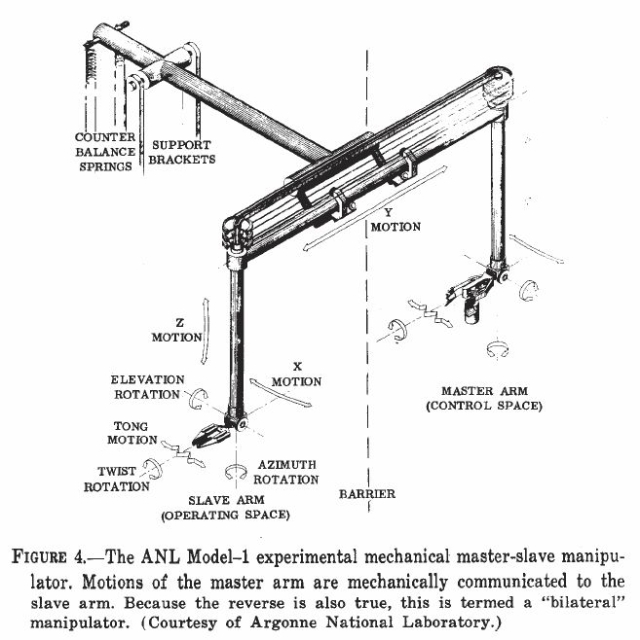
Earlier 1949 Mechanical Manipulator by Goertz.
Ray Goertz with his prototype manipulators.
See other early Teleoperators, Exoskeletons and Industrial Robots here.
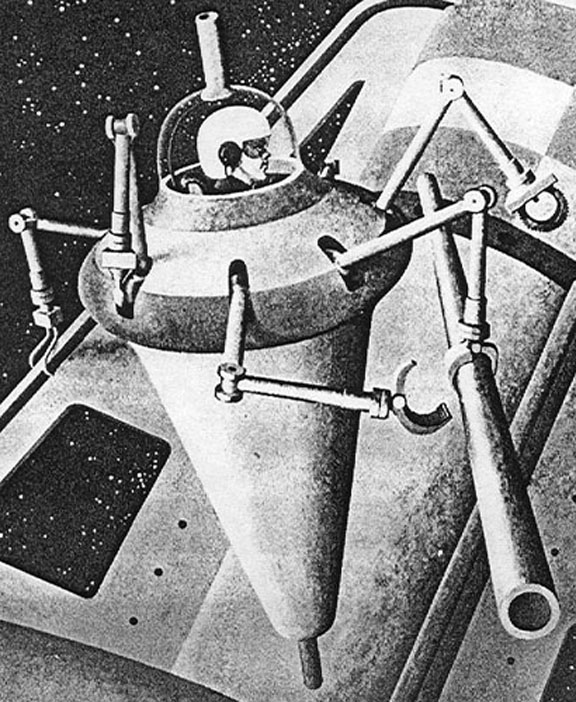
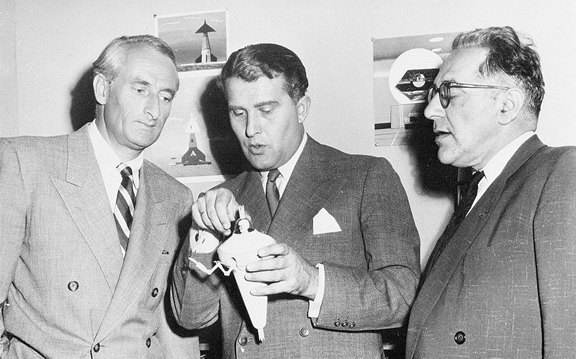
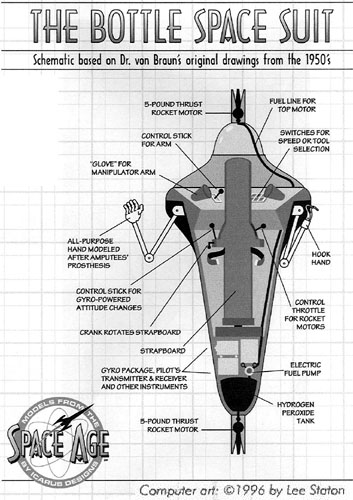
Wernher von Braun holding model of the Bottle Suit.
Bottle Suit
The Bottle Suit shows that when you plan to make your dreams come true, you have to create a number of intermediate solutions to problems you didn't anticipate. Problems like how to assemble a Space Station in Space. In order to assemble his proposed space station Von Braun designed a new, one man type of spaceship, a spacesuit. The Bottle suit evolved as part personal spaceship and part Swiss Army Knife.
This was probably the first space suit von Braun had designed specifically with the idea of allowing a single person extended duration in space. It would be used to assemble, not only the space station, but all the additional ships needed for his proposed Moon and Mars expeditions.
A versatile suit for construction, it was Gyro stabilized and had seven arms with different tools attached to each arm for the operator to use. Because you cannot put tools “down” when working in space you better always have them attached to you to prevent them from floating away. And because of that, the Bottle suit was well equipped for construction jobs in space. .
Also interesting is that it had rocket propulsion both at the top of the suit and below the suit to ensure it could both accelerate and decelerate. However, I have found no indication that it had any yaw or pitch thrusters to control its movement in those directions. Therefore it must have been using gyroscopes internally for rotating in these axes. This is an important pioneering development of a truly radical concept that would allow humans to work in space. Source: RogersRocketships.
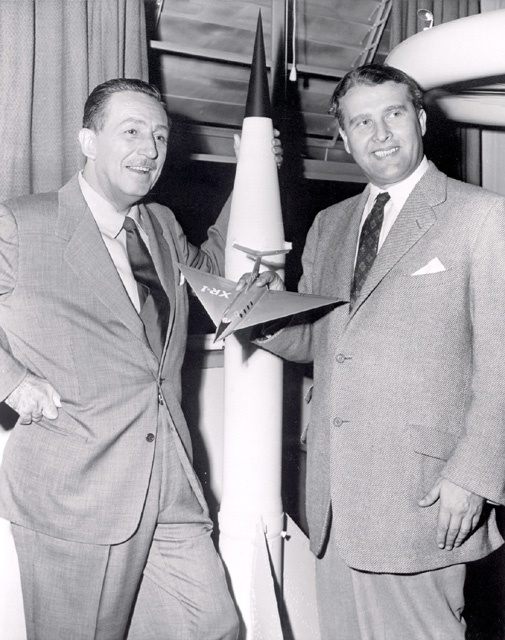
Walt Disney with Wernher von Braun.
Trip around the moon 1955
Selected von Braun text from the 1955 Walt Disney film, Trip around the Moon.
".. For the difficult job of re-assembling the structure [space station] we have provided a new type of space suit. Using gyros and two small rocket motors the operator can tilt and move in any direction. Located outside would be seven remotely controlled mechanical arms, each a speacilized tool. By rotating himself within the space suit, the operator can use any of the arms of the variety of tasks in ass,embling the space station. …"
"… Two crew members make their way to the cargo ship. First the motor and tanks are detached. Then two bottle-type construction suits are removed from the hull. When fitted in the air-lock, each of these construction suits will receive an operator. …"
"The sections of the cargo ship are moved back to make way for other supply rockets soon to arrive."
"Construction of the space wheel now begins…The sides of the cargo .. are mechanically separated. Built-in tanks compressed air inflate the inner section of the hub..
Thin metal plates are immediately placed over the thin plastic … outside to protect it from meteorites …The first workday in space draws to a close."
"Every 24-hours another cargo rocket will arrive in orbit. and the air-lock it attached .. to the sub-section and used as temporary quarters for eating and sleeping.
..can be assembled in the correct order.."
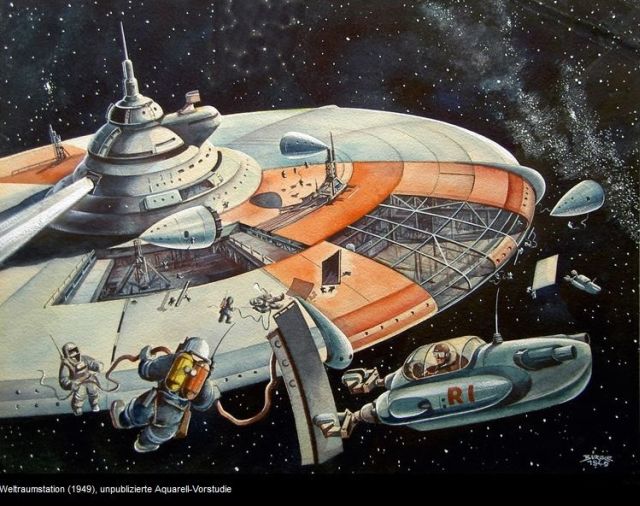
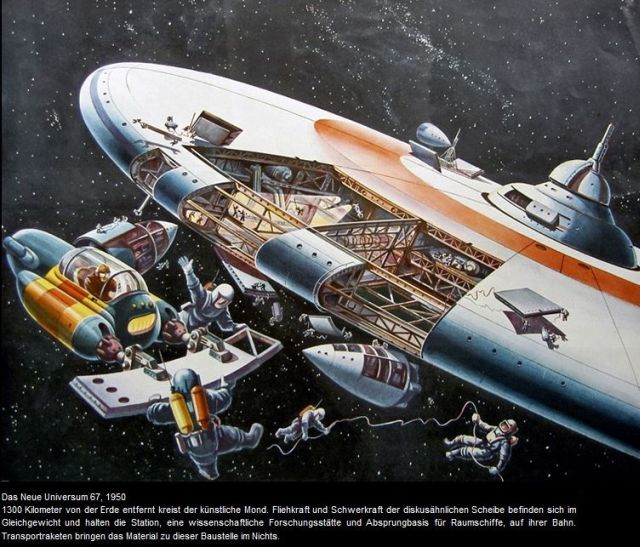
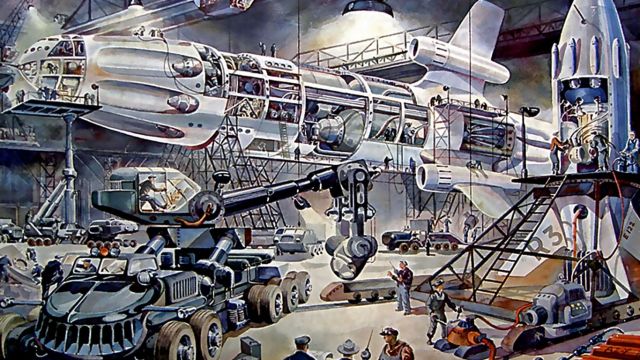
Note: The concept of a man inside a space capsule using manipulator arms largely came into being as a result of the logistics of getting man to the moon and beyond. The Space Station idea was conceived by Konstantin Tsiolkovsky in the early 20th century and then by Hermann Oberth about two decades later. In 1929 Herman Potočnik's The Problem of Space Travel was published, the first to envision a "rotating wheel" space station to create artificial gravity. But how to build a space station? Wernher von Braun was possibly, and probably the first to fully articulate the concept. When Walt Disney wanted to make his Space films (1954), von Braun was his consultant, and von Braun's ideas were visualised in the form of a "bottle suit". Von Braun was thinking about space stations in 1952, possibly earlier. I have not read or heard of Tsiolkovsky, Oberth or Potočnik mentioning space tugs or the like. The earliest idea I've found to date is the illustrator Klaus Bugle, who, in 1949, produced some illustrations on space station construction and showed space tugs with manipulator arms. Was he illustrating von Braun's ideas, or are these his own? For all intents and purposes, von Braun can be considered the grandfather of Space Station design and construction.
The above image from a 2010 calendar with Bürgle's illustrations. I don't know if the Space Station illustration was previously published and if so, where? The caption suggests it was unpublished at the time.
The Space Tugs are being used to hold and manoeuvre large panels during construction.
The graphic artist Klaus Bürgle created in the fifties and sixties of the last century a rich imagery of the future. The exploration of space was certainly his favorite subject, but many of his images also show futuristic cities and transportation.
Bürgle was born in 1926 in Stuttgart, where he attended from 1948 to 1951, the State Academy of Fine Arts. He was educated by professors Rössing and Schneider. After a year working in a graphic studio he became independent in 1953.
His technical interests soon meant that Bürgle is specialized in technical and scientific subjects and created for a variety of popular science books and magazines cover images and interior illustrations. He also worked for scientific television series.
Bürgle's 2010 Calendar cover.
Notes: The concept of a man inside a space capsule using manipulator arms largely came into being as a result of the logistics of getting man to the moon and beyond. The Space Station idea was conceived by Konstantin Tsiolkovsky in the early 20th century and then by Hermann Oberth about two decades later. In 1929 Herman Potočnik's The Problem of Space Travel was published, the first to envision a "rotating wheel" space station to create artificial gravity. But how to build a space station? Wernher von Braun was possibly, and probably the first to fully articulate the approach. When Walt Disney wanted to make his Space films (1954), von Braun was his consultant, and von Braun's ideas on construction were visualised in the form of a "bottle suit" with arms. Von Braun was thinking about space stations in 1952, possibly earlier. I have not read or heard of Tsiolkovsky, Oberth or Potočnik mentioning space tugs or the like. The earliest idea I've found to date is the illustrator Klaus Bugle, who, in 1949, produced some illustrations on space station construction and showed space tugs with manipulator arms. Was he illustrating von Braun's ideas, or are these his own?
More Bürgle illustrations of interest.
A depiction of unmanned moon crawlers originally for the Surveyor program. The crawler on the right-hand side is actually the Sperry luna crawler.