1954 – “Bottle Suit” – Wernher von Braun / Walt Disney (American)
"Bottle Suit"
Wernher von Braun holding model of the Bottle Suit.
Bottle Suit
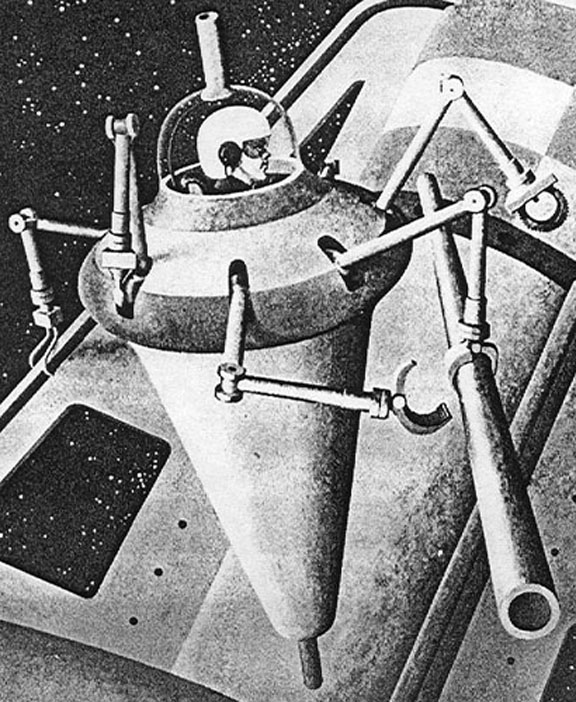
The Bottle Suit shows that when you plan to make your dreams come true, you have to create a number of intermediate solutions to problems you didn't anticipate. Problems like how to assemble a Space Station in Space. In order to assemble his proposed space station Von Braun designed a new, one man type of spaceship, a spacesuit. The Bottle suit evolved as part personal spaceship and part Swiss Army Knife.
This was probably the first space suit von Braun had designed specifically with the idea of allowing a single person extended duration in space. It would be used to assemble, not only the space station, but all the additional ships needed for his proposed Moon and Mars expeditions.
A versatile suit for construction, it was Gyro stabilized and had seven arms with different tools attached to each arm for the operator to use. Because you cannot put tools “down” when working in space you better always have them attached to you to prevent them from floating away. And because of that, the Bottle suit was well equipped for construction jobs in space. .
Also interesting is that it had rocket propulsion both at the top of the suit and below the suit to ensure it could both accelerate and decelerate. However, I have found no indication that it had any yaw or pitch thrusters to control its movement in those directions. Therefore it must have been using gyroscopes internally for rotating in these axes. This is an important pioneering development of a truly radical concept that would allow humans to work in space. Source: RogersRocketships.
Walt Disney with Wernher von Braun.
-

- Trip around the moon 1955


















































Selected von Braun text from the 1955 Walt Disney film, Trip around the Moon.
".. For the difficult job of re-assembling the structure [space station] we have provided a new type of space suit. Using gyros and two small rocket motors the operator can tilt and move in any direction. Located outside would be seven remotely controlled mechanical arms, each a speacilized tool. By rotating himself within the space suit, the operator can use any of the arms of the variety of tasks in ass,embling the space station. …"
"… Two crew members make their way to the cargo ship. First the motor and tanks are detached. Then two bottle-type construction suits are removed from the hull. When fitted in the air-lock, each of these construction suits will receive an operator. …"
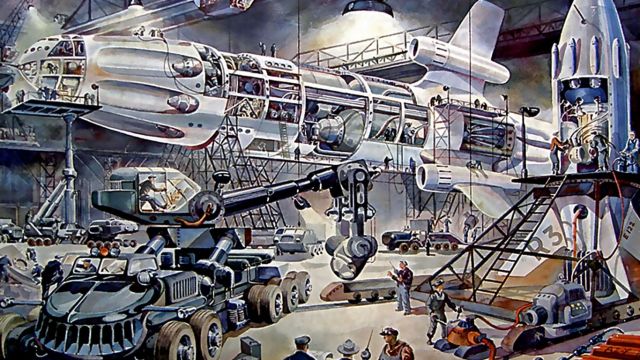
"The sections of the cargo ship are moved back to make way for other supply rockets soon to arrive."
"Construction of the space wheel now begins…The sides of the cargo .. are mechanically separated. Built-in tanks compressed air inflate the inner section of the hub..
Thin metal plates are immediately placed over the thin plastic … outside to protect it from meteorites …The first workday in space draws to a close."
"Every 24-hours another cargo rocket will arrive in orbit. and the air-lock it attached .. to the sub-section and used as temporary quarters for eating and sleeping.
..can be assembled in the correct order.."
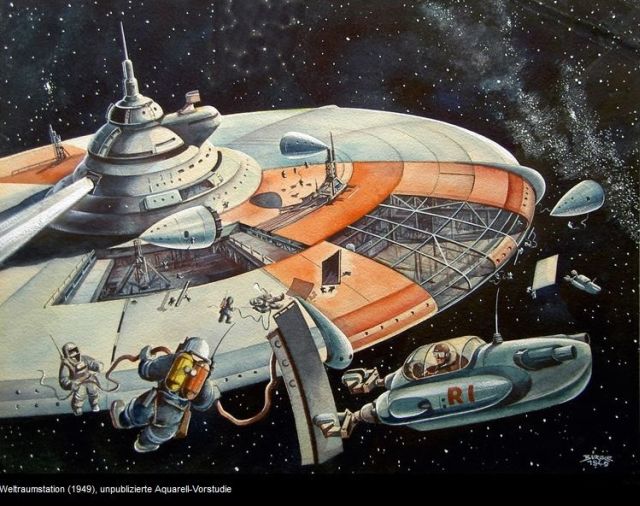
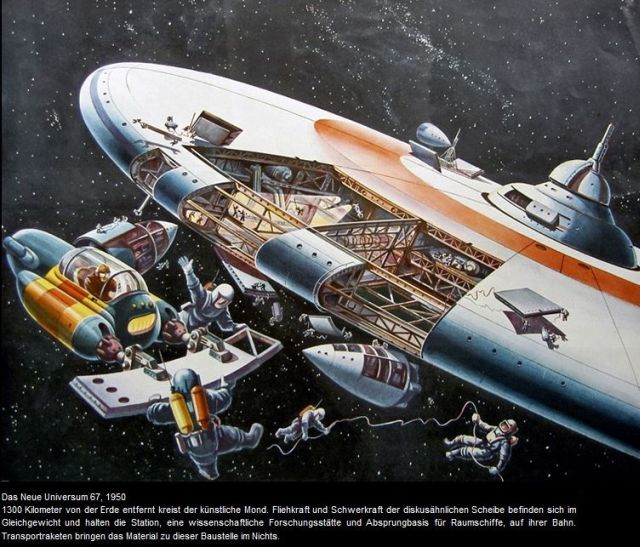
Note: The concept of a man inside a space capsule using manipulator arms largely came into being as a result of the logistics of getting man to the moon and beyond. The Space Station idea was conceived by Konstantin Tsiolkovsky in the early 20th century and then by Hermann Oberth about two decades later. In 1929 Herman Potočnik's The Problem of Space Travel was published, the first to envision a "rotating wheel" space station to create artificial gravity. But how to build a space station? Wernher von Braun was possibly, and probably the first to fully articulate the concept. When Walt Disney wanted to make his Space films (1954), von Braun was his consultant, and von Braun's ideas were visualised in the form of a "bottle suit". Von Braun was thinking about space stations in 1952, possibly earlier. I have not read or heard of Tsiolkovsky, Oberth or Potočnik mentioning space tugs or the like. The earliest idea I've found to date is the illustrator Klaus Bugle, who, in 1949, produced some illustrations on space station construction and showed space tugs with manipulator arms. Was he illustrating von Braun's ideas, or are these his own? For all intents and purposes, von Braun can be considered the grandfather of Space Station design and construction.
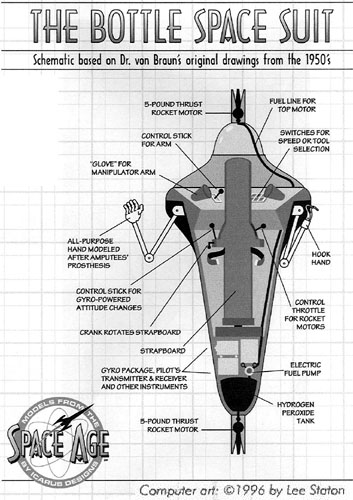
Image by Lee Staton.
Gallery of images found on the web.
Invalid Displayed Gallery
See other early Space Teleoperators here.
See other early Lunar and Space Robots here.